

2.3.1. Крупнейшие производители БПЛА самолетного типа. Беспилотная авиация: терминология, классификация, современное состояние
2.3.1. Крупнейшие производители БПЛА самолетного типа
Основные фирмы-производители БПЛА самолетного типа могут быть поделены на 2 категории [6]:
1. Крупные производители авиационной техники, для которых БПЛА не являются основной продукцией:
– Aerospatiale Matra, Франция
– Alliant Techsystems, США
– Bell Helicopter Textron, США
– Boeing, США
– British Aerospace, Англия
– Dassault Aviation, Франция
– Dawoo Heavy Industries, Южная Корея
– Daimler Chrysler Aerospace (DASA), Г ермания
– ENICS, Россия
– Fuji Heavy Industries, Япония
– GEC-Marconi, Англия (сейчас называется BAE)
– Kawada Industries, Япония
– Kaman Aerospace, США
– Kamov, Россия
– Matra BAE Dynamics, Франция-Англия
– Northrop Grumman, США
– Oerlikon-Contraves, Швейцария
– Raytheon, США
– Saab, Швеция
– SAIC, США
– Sikorsky Aircraft, США
– Sokol, Россия
– Teledyne Ryan Aeronautical, США
– Thomson-CSF Detexis, Франция
– TRW, США
– Tupolev, Russia
– Turkish Aerospace Industries, Турция
– Yakovlev, Россия
– Yamaha Motor Company, Япония
– Yanmar, Япония
2. Фирмы, специализирующиеся на БПЛА:
– AAI Corp., США
– Aerosonde Robotic Aircraft, Австралия
– AeroVironment, США
– АТЕ, Южная Африка
– BAI Aerosystems, США
– Bombardier-Canadair, Канада
– САС Systemes, Франция
– Domier (DAS А), Г ермания
– EES, Турция
– ЕМТ, Г ермания
– General Atomics Aeronautical Systems, США
– lnsitu Group, США
– Israeli Aircraft Industries, Израиль
– Kentron, Южная Африка
– Meteor, Италия
– Mission Technologies, США
– Pioneer UAV Inc., США
– Sagem, Франция
– Techno-Sud Industries, Франция
– Silver Arrow, Израиль
– S-Tee, США
– Schiebel Elektronische Gerate, Австрия
– STN Atlas Elektronik, Г ермания
Поделитесь на страничкеСледующая глава >
info.wikireading.ru
БЕСПИЛОТНЫЕ ЛЕТАТЕЛЬНЫЕ АППАРАТЫ
В последние годы появилось большое количество публикаций по использованию для решения топографических задач беспилотных летательных аппаратов (БПЛА), или беспилотных авиационных систем (БАС). Такой интерес в немалой степени вызван простотой их эксплуатации, экономичностью, относительно невысокой стоимостью, оперативностью и т.д. Перечисленные качества и наличие эффективных программных средств автоматической обработки материалов аэрофотосъемки (включая выбор необходимых точек) открывают возможности широкого использования программно-технических средств беспилотной авиации в практике инженерно-геодезических изысканий.
В этом номере обзором технических средств беспилотной авиации мы открываем серию публикаций о возможностях БПЛА и опыте их использования при полевых и камеральных работах.
Д.П. ИНОЗЕМЦЕВ,руководитель проекта ООО«ПЛАЗ»,г. Санкт-Петербург
БЕСПИЛОТНЫЕ ЛЕТАТЕЛЬНЫЕ АППАРАТЫ: ТЕОРИЯ И ПРАКТИКА
Часть 1. Обзор технических средств
ИСТОРИЧЕСКАЯ СПРАВКА
Беспилотные летательные аппараты появились в связи с необходимостью эффективного решения военных задач — тактической разведки, доставки к месту назначения боевого оружия (бомб, торпед и др.), управления боевыми действиями и пр. И не случайно первым их применением считается доставка австрийскими войсками бомб к осажденной Венеции с помощью воздушных шаров в 1849 году [1]. Мощным импульсом к развитию БПЛА послужило появление радиотелеграфа и авиации, что позволило существенно улучшить их автономность и управляемость.
Так, в 1898 году Никола Тесла разработал и продемонстрировал миниатюрное радиоуправляемое судно, а уже в 1910 году американский военный инженер Чарльз Кеттеринг предложил, построил и испытал несколько моделей беспилотных летательных аппаратов [2]. В 1933 году в Великобритании разработан первый БПЛА
многократного использования, а созданная на его основе радиоуправляемая мишень использовалась в королевском флоте Великобритании до 1943 года.
На несколько десятков лет опередили свое время исследования немецких ученых, давших миру в 1940-х годах реактивный двигатель и крылатую ракету «Фау-1» как первый применявшийся в реальных боевых действиях беспилотный летательный аппарат.
В СССР в 1930–1940 годы авиаконструктором Никитиным был разработан торпедоносец-планер типа «летающее крыло», а к началу 40-х был подготовлен проект беспилотной летающей торпеды с дальностью полета от 100 километров и выше, однако в реальные конструкции эти разработки не превратились.
После окончания Великой Отечественной войны интерес к БПЛА существенно возрос, а начиная с 1960-х годов отмечается их широкое внедрение для решения задач невоенного характера.
В целом историю БПЛА можно условно разделить на четыре временных этапа [3]:
1.1849 год–начало ХХ века — попытки и экспериментальные опыты по созданию БПЛА, формирование теоретических основ аэродинамики, теории полета и расчета самолета в работах ученых.
2.Начало ХХ века — 1945 год — разработка БПЛА военного назначения (самолетов-снарядов с небольшой дальностью и продолжительностью полета).
3.1945–1960 годы — период расширения классификации БПЛА по назначению и создание их преимущественно для разведывательных операций.
4.1960 годы — наши дни — расширение классификации и усовершенствование БПЛА, начало массового использования для решения задач невоенного характера.
КЛАССИФИКАЦИЯ БПЛА
Общеизвестно, что аэрофотосъемка, как вид дистанционного зондирования Земли (ДЗЗ), — это наиболее производительный метод сбора пространственной информации, основа для создания топографических планов и карт, создания трехмерных моделей рельефа и местности. Аэрофотосъемка выполняется как с пилотируемых летательных аппаратов — самолетов, дирижаблей мотодельтапланов и аэростатов, так и с беспилотных летательных аппаратов (БПЛА).
Беспилотные летательные аппараты, как и пилотируемые, бывают самолетного, а также вертолетного типа (вертолеты и мультикоптеры — летательные аппараты с четырьмя и более роторами с несущими винтами). В настоящее время в России не существует общепринятой классификации БПЛА самолетного типа. Missiles.
Ru совместно с порталом UAV.RU предлагает современную классификацию БПЛА самолетного типа [4], разработанную на основе подходов организации UAV International, но с учетом специфики и ситуации именно отечественного рынка (классы) (табл. 1):
Микро- и мини-БПЛА ближнего радиуса действия. Класс миниатюрных сверхлегких и легких аппаратов и комплексов на их основе с взлетной массой до 5 килограммов начал появляться в России относительно недавно, но уже довольно
широко представлен. Такие БПЛА предназначены для индивидуального оперативного использования на коротких дальностях на удалении до 25–40 километров. Они просты в эксплуатации и транспортировке, вы полняются складными и позиционируются как «носимые», запуск осуществляется, с помощью катапульты или с руки. Сюда относятся : Geoscan 101, Geoscan 201, 101ZALA 421-11, ZALA 421-08, ZALA 421-12, Т23 «Элерон», Т25, «Элерон-3», «Гамаюн-3», «Иркут-2М», «Истра-10»,
«БРАТ», «Локон», «Инспектор 101», «Инспектор 201», «Инспектор 301» и др.
Легкие БПЛА малого радиусадействия. К этому классу относятся несколько более крупные аппараты — взлетной массой от 5 до 50 килограммов. Дальность их действия — в пределах 10–120 километров.
Среди них: Geoscan 300, «ГрАНТ», ZALA 421-04, Орлан-10, ПтероСМ, ПтероЕ5, Т10, «Эле рон-10», «Гамаюн-10», «Иркут-10»,
Т92 «Лотос», Т90 (Т90-11), Т21, Т24, «Типчак» БПЛА-05, БПЛА-07, БПЛА-08.
|
Класс БПЛА |
Взлетная масса, кг |
Дальность действия, км |
|
Микро- и мини БПЛА ближнего радиуса действия |
5 |
25-40 |
|
Легкие БПЛА малого радиуса действия |
5-50 |
10-120 |
|
Легкие БПЛА среднегорадиуса действия |
50-100 |
70-150(250) |
|
Средние БПЛА |
100-300 |
150-1000 |
|
Среднетяжелые БПЛА |
300-500 |
70-300 |
|
Тяжелые БПЛА среднего радиуса действия |
>500 |
70-300 |
|
Тяжелые БПЛА большой продолжительности полета |
>500 |
1500 |
|
Беспилотные боевые самолеты (ББС) |
500 |
1500 |
Легкие БПЛА среднего радиуса действия. Ряд отечественных образцов можно отнести к этому классу БПЛА. Их масса варьируется в пределах 50–100 килограммов. К ним относится: Т92М «Чибис», ZALA 421-09,
«Дозор-2», «Дозор-4», «Пчела-1Т».
Средние БПЛА. Взлетная масса средних БПЛА лежит в диапазоне от 100 до 300 килограммов. Они предназначены для применения на дальностях 150–1000 километров. В этом классе: М850 «Астра», «Бином», Ла-225 «Комар», Т04, Е22М «Берта», «Беркут», «Иркут-200».
Среднетяжелые БПЛА. Этот класс имеют схожую с БПЛА предыдущего класса дальность применения, но обладают несколько большей взлетной массой — от 300 до 500 килограммов.
К этому классу следует отнести: «Колибри», «Данэм», «Дань-Барук», «Аист» («Юлия»), «Дозор-3».
Тяжелые БПЛА среднего радиуса действия. Данный класс включает БПЛА полетной массой от 500 и более килограммов, предназначены для применения на средних дальностях 70–300 километров. В классе тяжлых следующие: Ту-243 «Рейс-Д», Ту-300, «Иркут-850», «Нарт» (А-03).
Тяжелые БПЛА большой продолжительности полета. Достаточно востребованная за рубежом категория беспилотных аппаратов, к которой относятся американские БПЛА Predator, Reaper, GlobalHawk, израильские Heron, Heron TP. В России образцы практически отсутствуют: «Зонд-3M», «Зонд-2», «Зонд-1», беспилотные авиационные системы Сухого («БасС»), в рамках которой создается роботизированный авиационный комплекс (РАК).
Беспилотные боевые самолеты (ББС). В настоящее время в мире активно ведутся работы по созданию перспективных БПЛА, имеющих возможность нести на борту оружие и предназначенных для ударов по наземным и надводным стационарным и подвижным целям в условиях сильного противодействия сил ПВО противника. Они характеризуются дальностью действия около 1500 километров и массой от 1500 килограммов.
На сегодняшний день в России в классе ББС представлено два проекта: «Прорыв-У», «Скат» [4] .
***
На практике для аэрофотосъемки, как правило, применяются БПЛА весом до 10–15 килограммов (микро-, мини-БПЛА и легкие БПЛА). Это связано с тем, что при увеличении взлетного веса БПЛА растет сложность его разработки и, cоответственно, стоимость, но снижается надежность и безопасность эксплуатации. Дело в том, что при посадке БПЛА выделяется энергия E = mv2 / 2, а чем больше масса аппарата m, тем больше его посадочная скорость v, то есть выделяемая при посадке энергия очень быстро растет с ростом массы. А эта энергия может повредить как сам БПЛА, так и находящееся на земле имущество.
Беспилотный вертолет и мультикоптер лишены этого недостатка. Теоретически, такой аппарат можно посадить со сколь угодно малой скоростью сближения с Землей. Однако беспилотные вертолеты слишком дороги, а коптеры пока не способны летать на большие расстояния, и применяются только для съемки локальных объектов (отдельных зданий и сооружений).
Рис. 1. БПЛА Mavinci SIRIUS [5] Рис. 2. БПЛА Geoscan 101 [6]
ПРЕИМУЩЕСТВА БПЛА
Превосходством БПЛА перед пилотируемыми воздушными судами является, прежде всего, стоимость производства работ, а также значительное уменьшение количества регламентных операций. Само отсутствие человека на борту самолета значительно упрощает подготовительные мероприятия для проведения аэрофотосъемочных работ.
Во-первых, не нужен аэродром, даже самый примитивный. Беспилотные летательные аппараты запускаются или с руки, или с помощью специального взлетного устройства — катапульты.
Во-вторых, особенно при использовании электрической двигательной схемы, отсутствует необходимость в квалифицированной технической помощи для обслуживания летательного аппарата, не так сложны мероприятия по обеспечению безопасности на объекте работ.
В-третьих, отсутствует или намного увеличен межрегламентный период эксплуатации БПЛА по сравнению с пилотируемым воздушным судном.
Данное обстоятельство имеет большое значение при эксплуатации аэрофотосъемочного комплекса в удаленных районах нашей страны. Как правило, полевой сезон аэрофотосъемочных работ короток, каждый погожий день необходимо использовать для производства съемки.
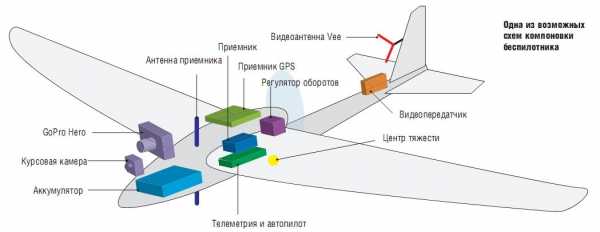
УСТРОЙСТВО БПЛА
две основные схемы компоновки БПЛА: классическая (по схеме «фюзеляж+крылья+хвост»), к которой относится, например БПЛА «Орлан-10», Mavinci SIRIUS (рис. 1) и др., и «летающее крыло», к которой относятся Geoscan101 (рис. 2), Gatewing X100, Trimble UX5 и др.
Основными частями беспилотного аэрофотосъемочного комплекса являются: корпус, двигатель, бортовая система управления (автопилот), наземная система управления (НСУ) и аэрофотосъемочное оборудование.
Корпус БПЛА изготавливают излегкого пластика (например, углепластика или кевлара), чтобы защитить дорогостоящую фотоаппаратуру и средства управления и навигации, а его крылья — из пластика или экструдированного пенополистирола (EPP). Этот материал легок, достаточно прочен и не ломается при ударе. Деформированную деталь из ЕРР зачастую можно восстановить подручными средствами.
Легкий БПЛА с посадкой на парашюте может выдержать несколько сотен полетов без ремонта, который, как правило, включает замену крыльев, элементов фюзеляжа и др. Производители стараются удешевить части корпуса, подверженные износу, чтобы расходы пользователя на поддержа-БПЛА в рабочем состоянии были минимальными.
Надо отметить, что наиболее дорогостоящие элементы аэрофотосъемочного комплекса, наземная система управления, авионика, программное обеспечение, — вообще не подвержены износу.
Силовая установка БПЛА можетбыть бензиновой или электрической. Причем, бензиновый двигатель обеспечит намного более продолжительный полет, так как в бензине, в расчете на килограмм, запасено в 10–15 раз больше энергии, чем мож-но сохранить в самом лучшем аккумуляторе. Однако такая силовая установка сложна, менее надежна и требует значительного времени для подготовки БПЛА к старту. Кроме того, беспилотный летательный аппарат с бензиновым двигателем крайне сложно перевозить к месту работ на самолете. Наконец, он требует от оператора высокой квалификации. Поэтому бензиновый БПЛА имеет смысл применять только в тех случаях, когда необходима очень большая продолжительность полета — для непрерывного мониторинга, для обследования особо удаленных объектов.
Электрическая двигательная установка, напротив, очень нетребовательна к уровню квалификации обслу-живающего персонала. Современные аккумуляторные батареи могут обеспечить длительность непрерывного полета свыше четырех часов. Обслуживание электрического двигателя совсем несложно. Преимущественно это только защита от влаги и грязи, а также проверка напряжения бортовой сети, что осуществляется с наземной системы управления. Зарядка аккумуляторов производится от бортовой сети сопровождающего автомобиля или от автономного электрогенератора. Бесколлекторный электрический двигатель БПЛА практически не изнашивается.
Автопилот —с инерциальной системой (рис. 3) — наиболее важный элемент управления БПЛА.
Автопилот весит всего 20–30 граммов. Но это очень сложное изделие. В автопилоте, кроме мощного процессора, установлено множество датчиков — трехосевые гироскоп и акселерометр (а иногда и магнитометр), ГЛО-НАСС/GPS-приемник, датчик давления, датчик воздушной скорости. С этими приборами беспилотный летательный аппарат сможет летать строго по заданному курсу.
Рис. 3. АвтопилотMicropilot[7]
В БПЛА имеется радиомодем, необходимый для загрузки полетного задания, передачи в наземную систему управления телеметрических данных о полете и текущем местоположении на участке работ.
Наземная система управления
(НСУ) —это планшетный компьютерили ноутбук, оснащенный модемом для связи с БПЛА. Важная часть НСУ — программное обеспечение для планирования полетного задания и отображения хода его выполнения.
Как правило, полетное задание составляется автоматически, по заданному контуру площадного объекта или узловым точкам линейного объекта. Кроме того, существует возможность проектирования полетных маршрутов, исходя из необходимой высоты полета и требуемого разрешения фотоснимков на местности. Для автоматического выдерживания заданной высоты полета есть возможность учесть в полетном задании цифровую модель местности в распространенных форматах.
Во время полета на картографической подложке монитора НСУ отображается положение БПЛА и контуры снимаемых фотографий. Оператор имеет возможность во время выполнения полета оперативно перенацелить БПЛА на другой район посадки и даже оперативно посадить беспилотник с «красной» кнопки наземной системы управления. По команде с НСУ могут быть запланированы и другие вспомогательные операции, например — выброс парашюта.
Кроме обеспечения навигации и обеспечения полета автопилот должен управлять фотоаппаратом, чтобы получать снимки с заданным межкадровым интервалом (как только БПЛА пролетит нужное расстояние от предыдущего центра фотографирования). Если заранее рассчитанный межкадровый интервал не выдерживается стабильно, приходится настраивать время срабатывания затвора с таким расчетом, чтобы даже при попутном ветре продольное перекрытие было достаточным.
Автопилот должен регистрировать координаты центров фотографирования геодезического спутникового приемника ГЛОНАСС/GPS, чтобы программа автоматической обработки снимков смогла построить модель быстро и привязать ее к местности. Требуемая точность определения координат центров фотографирования зависит от технического задания к выполнению аэрофотосъемочных работ.
Аэрофотосъемочное оборудование на БПЛА устанавливается в зависимости от его класса и цели использования.
На микро- и мини-БПЛА устанавливаются компактные цифровые фотокамеры, комплектуемые сменными объективами с постоянным фокусным расстоянием (без трансфокатора или zoom-устройства) весом 300–500 граммов. В качестве таких камер в настоящее время используются фотоаппараты SONY NEX-7
с матрицей 24,3 МП, CANON600D матрицей 18,5 МП и подобные им. Управление срабатыванием затвора и передача сигнала от затвора в спутниковый приемник производится с помощью штатных или незначительно доработанных электрических разъемов фотоаппарата.
На легкие БПЛА малого радиуса действия устанавливаются зеркальные фотокамеры с большим размером светочувствительного элемента, например CanonEOS5D(размер сенсора 36×24 мм) , NikonD800 (матрица 36,8 МП (размер сенсора 35,9×24 мм)), Pentax645D(CCD-сенсор 44×33 мм, матрица 40 МП) и им подобные, весом 1,0–1,5 килограмма.
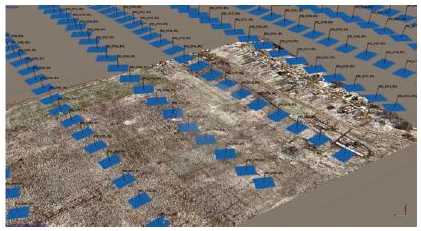
Рис. 4. Схема размещения аэроснимков (голубые прямоугольники с подписями номеров)
ВОЗМОЖНОСТИ БПЛА
Согласно требованиям документа «Основные положения по аэрофотосъемке, выполняемой для создания и обновления топографических карт и планов» ГКИНП-09-32-80 носитель аэрофотосъемочной аппаратуры должен предельно точно следовать проектному положению маршрутов аэрофотосъемки, выдерживать заданный эшелон (высоту фотографирования), обеспечивать требования по соблюдению предельных отклонений по углам ориентирования фотокамеры — наклон, крен, тангаж. Кроме того, навигационная аппаратура должна обеспечивать точное время срабатывания фотозатвора и определять координаты центров фотографирования.
Выше указывалась аппаратура, интегрированная в автопилот: это микробарометр, датчик воздушной скорости, инерциальная система, навигационная спутниковая аппаратура. По проведен-ным испытаниям (в частности, БПЛА Geoscan101) были установлены следующие отклонения реальных параметров съемки от заданных:
• уклонения БПЛА от оси маршрута — в диапазоне 5–10 метров;
• уклонения высот фотографирования — в диапазоне 5–10 метров;
• колебание высот фотографирования смежных снимков — не более
2 метров.
Возникающие в полете «елочки» (развороты снимков в горизонтальной плоскости) обрабатываются автоматизированной системой фотограмметрической обработки без заметных негативных последствий.
Фотоаппаратура, устанавливаемая на БПЛА, позволяет получить цифровые изображения местности с разрешением лучше 3 сантиметров на один пиксель. Применение коротко-, средне-, и длиннофокусных фотообъективов определяется ха-рактером получаемых готовых мате-риалов: будь это модель рельефа или ортофотоплан. Все расчеты производятся так же, как и в «большой» аэрофотосъемке.
Применение двухчастотной ГЛО-НАСС/GPSспутниковой геодезической системы для определения координат центров снимков позволяет в процессе постобработки получить координаты центров фотографирования с точностью лучше 5 сантиметров, а применение метода PPP(PrecisePointPositioning) — позволяет определять координаты центров снимков без использования базовых станций или на значительном удалении от них.
Конечная обработка материалов аэрофотосъемки может служить объективным критерием оценки качества выполненной работы. Для иллюстрации можно рассмотреть данные об оценке точности фотограмметрической обработки материалов аэрофотосъемки с БПЛА, выполненной в ПО «PhotoScan» (производства фирмы Agisoſt, г. СанктПетербург) по контрольным точкам (табл. 2).
|
Номера точек |
Ошибки по осям координат, м |
Абс, м |
Абс, пикс |
Проекции |
||
|
ΔХ |
ΔY |
ΔZ |
ΔD |
ΔD’ |
||
|
703 |
-0,017 |
-0,075 |
0,069 |
0,103 |
0,606 |
5 |
|
727 |
0,058 |
0,065 |
0,066 |
0,123 |
0,789 |
6 |
|
762 |
-0,060 |
0,020 |
-0,045 |
0,078 |
0,994 |
5 |
|
773 |
-0,021 |
0,100 |
-0,246 |
0,267 |
1,192 |
7 |
|
827 |
0,041 |
-0,111 |
0,138 |
0,181 |
1,346 |
8 |
|
(ΔD)2= ΔХ2+ ΔY2+ ΔZ2 |
||||||
ПРИМЕНЕНИЕ БПЛА
В мире, а в последнее время и в России, беспилотные летательные аппараты применяются в геодезических изысканиях при строительстве, для составления кадастровых планов промышленных объектов, транспортной инфраструктуры, поселков, дачных массивов, в маркшейдерском деле для определения объемов горных выработок и отвалов, при учете движения сыпучих грузов в карьерах, портах, горнообогатительных комбинатах, для создания карт, планов и 3D-моделей городов и предприятий.
Беспилотники применяются при мониторинге линий электропередач (определение зарастания, провисания проводов, деформации опор, повреждений изоляторов и проводов), трубопроводов (выявление врезок, незаконных построек, зарастания), дорог (выявление деформации насыпи, дефектов полотна), для мониторинга госграницы, особо охраняемых объектов, зон аэропортов (выявление изменений, выявление незаконных построек), акваторий портов и др.
Эти аппараты также применяются для обнаружения лесных пожаров, при ликвидации чрезвычайных ситуаций, отслеживании нарушителей ПДД, для проводки судов во льдах. Используют их и в потребительском секторе — для съемки спортивных соревнований, рекламных роликов, съемки для создания карт и 3D-моделей личных владений.
Литература
1. Павлушенко М., Евстафьев Г., Макаренко И. БПЛА: история, применение, угроза распространения и перспективы развития. М., «Права человека», 2005.
2. www.wikipedia.org.ua.
3. Цепляева Т.П., Морозова О.В. Этапы развития беспилотных летательных аппаратов. М., «Открытые информационные и компьютерные интегрированные технологии», № 42, 2009.
4. Сайт www.Missiles.ru.
5. Сайт www.mavinci.de.
6. Сайт www.geoscan.aero.
7. Сайт www.micropilot.com.
russiandrone.ru
Беспилотные летательные аппараты (БПЛА): российские, профессиональные
В наше время многие развивающиеся страны выделяют из бюджета немаленькие деньги на совершенствование и разработку новых образцов БПЛА — беспилотных летательных аппаратов. На театре военных действий не редкостью стали случаи, когда при решении боевой или учебной задачи командование отдавало предпочтение цифровой машине, нежели летчику. И на это был ряд веских причин. Во-первых, это беспрерывность работы. Дроны способны выполнять задачу на протяжении до 24 часов без перерыва на отдых и сон — неотъемлемых элементов человеческих потребностей. Во-вторых, это выносливость.
Беспилотник практически бесперебойно работает, в условиях высоких перегрузок, и там, где человеческий организм попросту не в состоянии выдержать перегрузки в 9G, дрон можно продолжать работу. Ну а в-третьих, это отсутствие человеческого фактора и выполнение задания согласно заложенной в компьютерный комплекс программы. Ошибиться может разве что только оператор, который вводит информацию на выполнение миссии — роботы не ошибаются.
Содержание статьи
История развития БПЛА
Человека достаточно давно посетила мысль о создании такой машины, которой можно было бы, без вреда для себя, управлять на расстоянии. Спустя 30 лет после первого полета братьев Райт эта идея воплотилась в реальность, и в 1933 году в Великобритании был построен специальный самолет на дистанционном управлении.

Фэйри Куин может по праву считаться первым БПЛА современной истории, и англичане использовали этот аппарат в качестве учебной мишени, для тренировки своих зенитчиков.
Первым дроном, принявшим участие в боях был немецкий Фау-1. Это была радиоуправляемая ракета с реактивным двигателем. Она была оснащена автопилотом, в который немецкие операторы вводили информацию о предстоящем полете. За годы Второй мировой войны эта ракета успешно выполнила около 20 тыс. боевых вылетов, нанося авиаудары по важным стратегическим и гражданским объектам Великобритании.
После окончания Второй мировой, США и Советский Союз по ходу растущих взаимных претензий друг к другу, ставшими плацдармом для начала холодной войны, начали выделять огромные деньги из бюджета на развитие беспилотных летательных аппаратов.
Так, во время ведения боевых действий во Вьетнаме, обе стороны активно применяли БПЛА, для решения различных боевых задач. Радиоуправляемые аппараты делали аэрофотоснимки, вели радиолокационную разведку и их применяли в роли ретрансляторов.
В 1978 году случился настоящий прорыв в истории развития беспилотников. ИАИ Скаут был представлен военпредами Израиля и стал первым в истории боевым БПЛА.

А в 1982 году, во время войны в Ливии этот дрон практически полностью уничтожили сирийскую систему ПВО. Во время ведения тех боевых действий армия Сирии потеряла 19 зенитных батарей и было уничтожено 85 самолетов.
После этих событий американцы стали уделять максимум внимания к разработке дронов, и в 90-х годах стали мировыми лидерами в области применения беспилотных летательных аппаратов.
Дроны активно использовались в 1991 году во время «Бури в пустыне», а также в ходе военных операции на территории Югославии в 1999 году. Сейчас на вооружении армии США стоит около 8,5 тыс. радиоуправляемых дронов и это в основном малогабаритные БПЛА для выполнения разведывательных задач в интересах сухопутных войск.
Конструктивные особенности
Со времен изобретения британцами дрона-мишени, наука сделала огромный шаг вперед в развитии летающих роботов на дистанционном управлении. Современные беспилотники имеют большую дальность и скорость полета.
Это происходит в основном за счет жесткой фиксации крыла, мощности встроенного в робот двигателя и применяемого топлива, конечно. Имеются беспилотники и на аккумуляторах, но они не в состоянии конкурировать по дальности полета с топливными, во всяком случае, пока.
Обширное применение при проведении разведывательных действий получили глайдеры и конвертопланы. Первые довольно просты в производстве и не требуют больших финансовых вложений, и в некоторых образцах по конструкции не предусмотрен двигатель.
Отличительной особенностью вторых, является то, что его взлет основан на вертолетной тяге, в то время как при маневрировании в воздухе, эти дроны используют самолетные крылья.
Тейлсиггеры — роботы, которых разработчики наделили способностью менять профили полета находясь непосредственно в воздухе. Происходит это за счет поворота либо всей, либо части конструкции в вертикальной плоскости. Также бывают проводные беспилотники и пилотирование дрона осуществляется посредством передачи на его борт команд управления через подсоединенный кабель.
Есть беспилотники, отличающиеся от остальных набором своих нестандартных функций или выполненные функций в необычном стиле. Это экзотические БПЛА, и некоторые из них могут без труда приземлиться на воду или закрепиться на вертикальной поверхности как рыба-прилипала.

БПЛА, в основе которых лежит вертолетная конструкция, также отличаются друг от друга своими функциями и задачами. Существуют аппараты как с одним винтом, так и несколькими — такие дроны именуют квадрокоптерами, и используют их преимущественно в «гражданских» целях.
У них бывают по 2, 4, 6 или 8 винтов, парно и симметрично расположенных от продольной оси робота, и чем их больше, тем лучше БПЛА устойчив в воздухе, и он намного лучше управляем.
Какие бывают беспилотники
| По способу управления | По весовой категории |
|---|---|
| неуправляемые | микро |
| дистанционно управляемые | малые |
| автоматические | средние |
| тяжелые |
В неуправляемых БПЛА человек принимает участие только при запуске и введении параметров полета перед взлетом дрона. Как правило, это бюджетные беспилотники, не требующие для их эксплуатации особой подготовки оператора и специальных площадок приземления.

В дистанционно управляемых дронах предусмотрена их корректировка траектории полета, а автоматические роботы выполняют задачу полностью автономно. Успех выполнения миссии здесь зависит от точности и правильности введения предполетных параметров оператором в стационарный компьютерный комплекс, находящийся на земле.
Вес аппаратов микро не более 10 кг., и они могут находиться в воздухе не более часа, дроны группы мини весят до 50 кг., и способны выполнять задачу 3…5 часов без перерыва, у средних вес некоторых образцов достигает 1 тонны и их время работы составляет 15 часов. Что касается тяжелых БПЛА, которые весят больше тонны — эти дроны могут беспрерывно летать больше 24 часов, а некоторым из них под силу межконтинентальные перелеты.
Зарубежные беспилотники
Одним из направлений в развитии БПЛА является уменьшение их габаритов без существенного ущерба для технических характеристик. Норвежская компания «Прокс Динамикс» разработала микро дрон ПД-100 Блэк Хорнет вертолетного типа.

Данный беспилотник может работать около четверти часа на расстоянии до 1 км. Этот робот применяется в качестве индивидуального разведывательного средства солдата и оснащен тремя видеокамерами. Используется некоторыми регулярными подразделениями США в Афганистане с 2012 года.
| ТТХ Блэк Хорнет | |
|---|---|
| Длина | 100 мм. |
| Вес | 120 гр. |
| Дальность полета | 1000 м. |
| Время работы | 25 мин. |
| Оснащение | 3 оптические видеокамеры с разрешением в 3 МП |
Самый распространенный беспилотник армии США — РКью-11 Рэйвен. Его запуск производится с руки солдата и для его приземления не требуется специальной площадки, он может летать как в автоматическом режиме, так и находясь под управлением оператора.

Этот легкий беспилотник солдаты США применяют при решении задач ближней разведки на уровне роты.
| ТТХ РКью-11 Рэйвен | |
|---|---|
| Длина, мм | 790 |
| Вес, гр. | 1800 |
| Размах крыла, м | 1.5 |
| Дальность полета, км | до 5 |
| Силовая установка | Электродвигатель |
| Время работы, мин | 45…60 |
| Оснащение | цифровая видеокамера дневного обзора, камера ночного видения |
Более тяжелые БПЛА американской армии представляют РКью-7 Шэдоу и РКью-5 Хантер. Оба образца предназначены для производства разведки местности на уровне бригады.

Беспрерывное время работы в воздухе этих беспилотников существенно отличается от более легких образцов. Существуют множественные их модификации, некоторые из которых включают в себя функции подвешивания на них небольших управляемых бомб массой до 5.4 кг.
МКью-1 Предатор — это самый известный американский дрон. Изначально его основной задачей, как и у многих других образцов, была разведка местности. Но вскоре, в 2000 году, производители внесли в его конструкцию ряд модификаций, позволяющих ему выполнять боевые задачи, связанные с непосредственным уничтожением целей.

Помимо подвешиваемых ракет (Хеллфайр-С, созданные специально для этого беспилотника в 2001 году), на борту робота установлены три видеокамеры, инфракрасная система и своя бортовая радиолокационная станция. Сейчас существуют несколько модификаций МКью-1 Предатора для выполнения задач самого различного характера.
В 2007 году появился еще один ударный БПЛА—американский МКью-9 Рипер. По сравнению МКью-1 Предатор его показатель продолжительности полета был намного выше, а также помимо ракет мог нести на борту управляемые авиабомбы и имел более современную радиоэлектронику.
| Вид БПЛА | МКью-1 Предатор | МКью-9 Рипер |
|---|---|---|
| Длина, м | 8.5 | 11 |
| Скорость, км/ч | до 215 | до 400 |
| Вес, кг | 1030 | 4800 |
| Размах крыла, м | 15 | 20 |
| Дальность полета, км | 750 | 5900 |
| Силовая установка, двигатель | поршневой | турбовинтовой |
| Время работы, ч | до 40 | 16-28 |
| Ракетная/бомбовая нагрузка | до 4-х ракет Хеллфайр-С | бомбы до 1700 кг |
| Практический потолок, км | 7.9 | 15 |
Самым большим БПЛА в мире по праву считается РКью-4 Глобал Хоук. В 1998 году он впервые поднялся в воздух и по сей день выполняет задачи разведывательного характера.
Этот дрон — первый в истории робот, который может использовать воздушное пространство и воздушные коридоры США без разрешения органа управления воздушным движением.
| ТТХ РКью-4 Глобал Хоук | |
|---|---|
| Длина, м | 13.3 |
| Размах крыла, м | 35 |
| Дальность полета, км | 22 000 |
| Вес, т | 15 |
| Силовая установка | Турбовентиляторный двигатель |
| Оснащение | ИК-система, комплекс для веденияразведки, РЛК-комплекс |
| Время работы, ч | 36 |
| Практический потолок, км | 18 |
Отечественные БПЛА
Российские беспилотники условно подразделяют на следующие категории
| Ближнего радиуса действия | До 25 км |
|---|---|
| Малой дальности | От 50 до 100 км |
| Средней дальности | От 100 до 500 км |
| Большой дальности | Свыше 500 км |
БПЛА «Элеон-ЗСВ» относится к аппаратам ближнего радиуса действия, он довольно прост в эксплуатации и его легко переносить в заплечном ранце. Запускается дрон вручную со жгута или сжатым воздухом от насоса.

Способен вести разведку и передавать информацию по цифровому видеоканалу на расстоянии до 25 км. Элеон-10В схож по конструкции и правилам эксплуатации с предыдущим аппаратом. Главное их отличие — увеличение дальности полета до 50 км.
Процесс приземления этих БПЛА осуществляется при помощи специальных парашютов, выбрасываемых при выработке дроном своего заряда батареи.
| Вид БПЛА | Элеон-3СВ | Элеон-10В |
|---|---|---|
| Длина, мм | 740 | 1150 |
| Вес, кг | 4.3 | 5.9 |
| Скорость, км/ч | 70…100 | 75…135 |
| Дальность полета, км | 25 | 50 |
| Время работы, ч | 1.5…2 | 2.5 |
| Практический потолок, км | 5 | 5 |
Рейс-Д (Ту-243) — разведывательно-ударный дрон, способный нести на себе авиавооружение массой до 1 т. Аппарат, выпущенный конструкторским бюро имени Туполева, свой первый полет совершил в 1987 году.

С тех пор беспилотник претерпел множественные улучшения, были установлены: усовершенствованный пилотажно-навигационный комплекс, новые приборы ведения радиолокационной разведки, а также конкурентоспособная оптическая система.
Иркут-200 — больше ударный беспилотник. И в нем в первую очередь ценится высокая автономность аппарата и маленькая масса, благодаря которой могут осуществляться перелеты продолжительностью до 12 часов. Приземляется БПЛА на специально оборудованную площадку длиной около 250 м.
| Вид БПЛА | Рейс-Д (Ту-243) | Иркут-200 |
|---|---|---|
| Длина, м | 8.3 | 4.5 |
| Вес, кг | 1400 | 200 |
| Силовая установка | турбореактивный двигатель | ДВС мощностью 60 л. с. |
| Скорость, км/ч | 940 | 210 |
| Дальность полета, км | 360 | 200 |
| Время работы, ч | 8 | 12 |
| Практический потолок, км | 5 | 5 |
Скат — тяжелый БПЛА большой дальности нового поколения разрабатываемый КБ МиГ. Этот дрон будет малозаметен для вражеских радаров, благодаря схеме сборки корпуса, исключающей хвостовое оперение.

Задачей этого дрона нанесение точных ракетно-бомбовых ударов по наземным целям, таким как зенитные батареи войск ПВО или стационарные командные пункты. По задумке разработчиков БПЛА Скат сможет выполнять задачи как автономно, так и в составе звена самолетов.
| Длина, м | 10,25 |
|---|---|
| Скорость, км/ч | 900 |
| Вес, т | 10 |
| Размах крыла, м | 11,5 |
| Дальность полета, км | 4000 |
| Силовая установка | Двухконтурный турбореактивный двигатель |
| Время работы, ч | 36 |
| Ракетная/бомбовая нагрузка | Корректируемые авиабомбы 250 и 500 кг. |
| Практический потолок, км | 12 |
Недостатки беспилотных летательных аппаратов
Одним из недостатков БПЛА является сложность при его пилотировании. Так, к пульту управления не может подойти обычный рядовой не прошедший курс специальной подготовки и не знающий определенных тонкостей при использовании компьютерного комплекса оператора.

Еще одним существенным недостатком является сложность поисков беспилотников, после их приземления при помощи парашютов. Потому как некоторые модели, когда заряд батареи близок к критическому могут выдавать некорректные данные о своем местонахождении.
К этому можно еще прибавить чувствительность некоторых моделей к ветру, ввиду легкости конструкции.
Некоторые беспилотники могут подниматься на большую высоту и это в некоторых случаях занятие высоты того или иного дрона требует разрешения у органа управления воздушным движением, что может существенно осложнить выполнение задания к определенному сроку, потому как приоритет в воздушном пространстве отдается судам под управлением пилота, а не оператора.
Использование БПЛА в гражданских целях
Беспилотники нашли свое призвание не только на полях сражений или в ходе выполнений войсковых операций. Сейчас дроны активно используются для вполне мирных целей граждан в городских условиях и даже в некоторых отраслях сельского хозяйства им нашлось применение.

Так некоторые курьерские службы используют роботов на вертолетной тяге для доставки самых разнообразных товаров своим клиентам. При помощи дронов ведется аэрофотосъемка многими фотографами при организации торжественных мероприятий.
А также их приняли к себе на вооружение некоторые детективные агентства.
Заключение
Беспилотные летательные аппараты — существенно новое слово в век стремительно развивающихся технологий. Роботы идут в ногу со временем, охватывают не только одно направление, а развиваются сразу в нескольких.
Но все же, несмотря на еще далекие от идеала, по меркам человека, модели в области погрешностей или дальностей полета, БПЛА имеют один огромный и неоспоримый плюс. Дроны, за время их использования сохранили сотни человеческих жизней, а это дорогого стоит.
Видео
warbook.club
1.2.2.5. БПЛА аэростатического типа. Беспилотная авиация: терминология, классификация, современное состояние
1.2.2.5. БПЛА аэростатического типа
БПЛА аэростатического типа (blimps) – это особый класс БПЛА, в котором подъемная сила создается преимущественно за счет архимедовой силы, действующей на баллон, заполненный легким газом (как правило, гелием). Этот класс представлен, в основном, беспилотными дирижаблями.
Дирижабль (от фр. dirigeable – управляемый) – Л А легче воздуха, представляющий собой комбинацию аэростата с движителем (обычно это винт (пропеллер, импеллер) с электрическим двигателем или ДВС) и системы управления ориентацией.
По конструкции дирижабли подразделяются на три основных типа: мягкий, полужёсткий и жёсткий [45].
В дирижаблях мягкого и полужёсткого типа оболочка для несущего газа мягкая, которая приобретает требуемую форму только после закачки в неё несущего газа под определённым давлением. В дирижаблях мягкого типа неизменяемость внешней формы достигается избыточным давлением несущего газа, постоянно поддерживаемым баллонетами – мягкими ёмкостями, расположенными внутри оболочки, в которые нагнетается воздух (рис. 1.59). Баллонеты, кроме того, служат для регулирования подъемной силы и управления углом тангажа (дифференцированная откачка/закачка воздуха в баллонеты приводит к изменению центра тяжести аппарата).
Дирижабли полужёсткого типа отличаются наличием в нижней части оболочки жесткой (в большинстве случаев на всю длину оболочки) фермы. В жёстких дирижаблях неизменяемость внешней формы обеспечивается жестким каркасом, обтянутым тканью, а газ находится внутри жёсткого каркаса в баллонах из газонепроницаемой материи. Жесткие дирижабли в беспилотном исполнении пока практически не применяются.
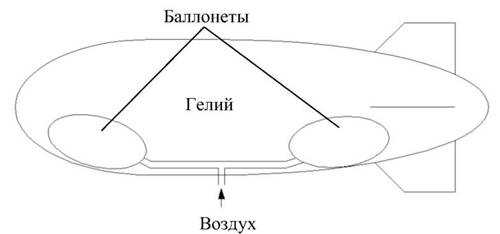
Рис. 1.59. Система баллонетов
Хорошим примером современного мягкого дирижабля является Skyship 600, разработанный в 1984 г. британской компанией Airship Industries (рис. 1.60). Skyship 600 изготовлен из кевлара и композитных материалов. Большинство построенных дирижаблей Skyship 600 были использованы в рекламных целях [46]. Он может использоваться как в пилотируемом, так и в беспилотном вариантах. В состав оснащения входят бортовые видеокамеры, которые позволяют производить круглосуточный мониторинг территорий. На летних Олимпийских играх 2004 года дирижабль Skyship 600 применялся для видеонаблюдения.
Дирижабль Skyship 600 имеет, как и большинство дирижаблей, традиционную сигарообразную форму. Его основные параметры: длина: 66 м, высота: 22 м; объем оболочки: 7600 м 3 ; крейсерская скорость: 64 км / ч; потолок: 2100 м; дальность полета 644 км; двигатели: 2 х Porsche 930 мощностью по 255 л.с. Положением воздушного корабля можно управлять с помощью баллонетов, поворотных элементов хвостового оперения, а также с помощью двух отклоняемых импеллеров.
Малые мягкие беспилотные дирижабли выпускает множество фирм во всем мире. Они предназначены для управляемых полетов как внутри помещений (таких как выставочные залы, стадионы и т.д.), так и на открытом воздухе.

а

б

в
Рис. 1.60. Дирижабль Skyship 600, разработанный в 1984 г. британской компанией Airship Industries: а – у причальной мачты; б – в полете; в – отклоняемые импеллеры
На рис. 1.61 показан дешевый беспилотный дирижабль фирмы Minizepp (Швейцария). Емкости аккумулятора хватает этому аппарату на 10 часов полета. Его длина составляет 5 м. Дальность полета 300 км, предельная высота 3000 м, максимальная скорость 65 км/ч.
Наиболее типичные применения современных беспилотных дирижаблей – это реклама и видеонаблюдение. Однако в последние годы их все чаще заказывают телекоммуникационные компании для использования в качестве ретрансляторов сигналов. Существуют также проекты постройки дирижаблей очень большой грузоподъемности – 200-500 тонн [47].

Рис. 1.61. Дирижабль фирмы Minizepp (Швейцария, 2012)
Привлекают внимание новые концепты дирижаблей, имеющие, как правило, нетрадиционные форму оболочки и способ движения. Так, в России успешно испытаны дирижабли, имеющие не сигарообразную, а дисковидную форму. Беспилотные дирижабли линзообразной формы планирует выпускать ОАО «Долгопрудненское конструкторское бюро автоматики» при поддержке «Рособоронэкспорта» и «Ростехнологий». Они будут иметь от 22 до 200 м в диаметре и смогут переносить до нескольких сотен тонн груза. Пока созданы лишь демонстрационные масштабные модели таких дирижаблей. Пример – успешно испытанная модель ДП-27 «Анюта» (рис. 1.62). Дисковидная форма этого аппарата обеспечивает устойчивость к боковому ветру, простоту управления и высокую маневренность этого многоцелевого беспилотного дирижабля. Диаметр корпуса судна – 17 м с объёмом оболочки – 522 куб. м, грузоподъёмность – 200 кг, максимальная высота подъёма достигает 800 м. С помощью 4 двигателей по 25 л.с. аппарат развивает скорость до 80 км/ч, бензобак объемом 40 л позволяет демонстратору осуществлять полёт на дистанцию 300 км. Данный образец предназначен для проверки конструкционных решений и систем управления, которые впоследствии будут применены на полномасштабном опытном дирижабле [48].
Рис. 1.62. Экспериментальный дирижабль «Анюта» Долгопрудненского конструкторского бюро автоматики (Россия, 2011)
В другой разработке российских дирижаблестроителей (компания «Локомоскай» в сотрудничестве с ульяновским ЗАО «Авиастар-СП» [47]) основной особенностью является то, что помимо объемов гелия в аппарате присутствует полость, заполняемая подогреваемым воздухом (идея, предложенная К.Э. Циолковским в 90-х гг. XIX века). Благодаря такой конструкции, позволяющей контролировать подъемную силу, аппарат сможет совершать не только вертикальный взлет, но и зависать в одной точке или садиться на любую ровную площадку – в отличие от классических дирижаблей, которым необходимы специальные мачты для причаливания. Для передвижения аппарата используются электродвигатели (рис. 1.63). Кроме этого, по краям дирижабля планируется расположить небольшие крылья, которые тоже будут создавать некоторую подъемную силу. Дискообразная форма позволяет обеспечить устойчивость под напором ветра (до 20 м/с) при зависании аппарата над определенной точкой. По расчетам, AТЛА (аэростатический термобалластируемый летательный аппарат) «Локомоскайнер» будет способен развивать скорость до 110 километров в час, а максимальная дальность его полета составит 3000 км.

Рис. 1.63. Демонстрационная модель «Локомоскайнера» (Россия, 2010)
Интересны гибридные концепты, в которых объединяются, как правило, аэростатическая и аэродинамическая подъемные силы. Обычные дирижабли иногда обозначают в англоязычных источниках как LTA (Lighter Than Air – легче воздуха). Гибридные аппараты несколько тяжелее воздуха, поэтому обозначаются как НТА (Heavier Than Air). Обычно они представляют собой гибрид дирижабля и самолета. Пример – аппарат Dynalifter DL-100 американской фирмы Ohio Airships (рис. 1.64). Для взлета и посадки аппарату нужна ВПП, однако это окупается очевидными достоинствами по сравнению с обычными дирижаблями: простота взлета и посадки без необходимости иметь специальные персонал и приспособления, устойчивость к ветровым нагрузкам, в том числе при нахождении на земле. В то же время сохраняется, как у всех дирижаблей, способность летать на очень низких скоростях при малых энергетических затратах [49].

Рис. 1.64. Гибридный аппарат Dynalifter DL-100 (США, 2012): а – взлет; б – распределение подъемной силы
В России несколько лет назад был разработан гибрид дирижабля, самолета, вертолета, а также судна на воздушной подушке (СВП) (рис. 1.65). Этот уникальный проект Сибирского научно- исследовательского института авиации (СибНИИА) и ОАО «Тюменьэкотранс» был назван «БАРС» (Безаэродромный с Аэростатической Разгрузкой Самолет) [50]. Создателям БАРСа удалось в этом аппарате исключить недостатки дирижабля, самолета, вертолета и СВП, но сохранив их положительные качества. Так, например, были исключены такие недостатки: у дирижабля – парусность, необходимость иметь сложную систему обслуживания; у самолета – необходимость иметь аэродром; у вертолета – небольшую дальность и дороговизну перевозок. Применение же элементов СВП и несущего винта вертолета позволило обеспечить безаэродромность базирования и эксплуатацию с любой ровной поверхности (воды, болота, снега, грунта). Сохранение элементов самолета (несущие поверхности) и дирижабля (подъемный газ) позволило получить большую грузоподъемность, дальность и высокую экономичность перевозок. Грузоподъемность аппарата может достигать 500 тонн, крейсерская скорость – до 300 км/ч, а дальность полета составляет 3350-4500 км.

Рис. 1.65. Макет гибридного аппарата БАРС (Россия, 2012)
Среди серийно производимых беспилотных гибридов на базе дирижаблей стоит выделить интересную разработку итальянской фирмы Nimbus, которая представляет собой своеобразную комбинацию дирижабля и дельтаплана [51] (рис. 1.66). Очевидные достоинства аппарата: легкость, экономичность, способность летать на низких скоростях, бесшумность, простота транспортировки, низкая стоимость (в т.ч. обслуживания). Недостаток – невозможность работы при сильном ветре.
Рис. 1.66. Гибрид дирижабля и дельтаплана компании Nimbus (Италия, 2013)
Одним из самых успешных проектов в области разработки гибридных аппаратов, использующих одновременно аэростатический и аэродинамический принципы создания подъемной силы, является аппарат Р-791 американской компании Lockheed Martin [52] (рис. 1.67). Он разрабатывается как в пилотируемом, так и в беспилотном вариантах. Первый полёт прототипа этого воздушного судна состоялся в январе 2006 г. Для взлёта аппарату необходима взлётная полоса. В дирижабле Р-791 решена проблема надёжной посадки дирижабля – для этой цели используются 4 воздушные подушки-присоски. Аппарат обладает большой грузоподъёмностью – в новых моделях дирижаблей заложена возможность перемещения грузов массой до 1000 тонн (проект «Морж» (Walrus)).

Рис. 1.67. Гибридный аппарат компании Lockheed Martin (США, 2010)
Поделитесь на страничкеСледующая глава >
info.wikireading.ru
1.2. Беспилотные летательные аппараты. Беспилотная авиация: терминология, классификация, современное состояние
1.2.1. Основные понятия и определения
Существует большое количество различных определений БПЛА. Вот одно из самых простых: «Беспилотный летательный аппарат – это летательный аппарат без человека (экипажа) на борту» [9]. Однако в таком случае к БПЛА нужно причислить вообще все летающие искусственные объекты, что, очевидно, неправильно.
На сегодняшний день наиболее адекватным определением БПЛА представляется то, которое практически повторяет определение для беспилотного мобильного средства, данное в подразделе 1.1. Отличие состоит лишь в указании среды функционирования. Повторим это определение применительно к БПЛА.
Беспилотный летательный аппарат – это летательный аппарат многоразового или условно-многоразового использования, не имеющий на борту экипажа (человека-пилота) и способный самостоятельно целенаправленно перемещаться в воздухе для выполнения различных функций в автономном режиме (с помощью собственной управляющей программы) или посредством дистанционного управления (осуществляемого человеком- оператором со стационарного или мобильного пульта управления).
Заметим, что к БПЛА не относятся все ракеты, снаряды, бомбы (независимо от того, управляемые они или нет), аэростаты без двигателей и другие безмоторные летательные аппараты: планеры, дельтапланы, парапланы. Но беспилотные дирижабли, моторные дельтапланы и парапланы в соответствии с данным определением вполне можно отнести к БПЛА. Существуют другие, более узкие понятия БПЛА. Например, известны такие определения, в которых к БПЛА причисляют только аппараты самолетного и вертолетного типов [10].
Основные термины и аббревиатуры, касающиеся БПЛА, приведены в табл. 1.2. Разница в терминах БПЛА и ДПЛА (дистанционно-пилотируемый летательный аппарат) в том, что первый является более общим понятием. ДПЛА относится к тем аппаратам, которые управляются оператором дистанционно по радио с наземного пункта, тогда как в общем случае БПЛА может выполнять задачу и автономно, по заложенной в нем программе.
Недавно появившиеся термины UAS (Unmanned Aerial System) и соответствующий русскоязычный БАС (беспилотная авиационная система) учитывают не только сам летательный аппарат (аппараты), но также всю инфраструктуру и средства обеспечения (транспортно-пусковое устройство, средства связи, наземный пункт управления и др.) [11]. В наших источниках встречается также термин БАК (беспилотный авиационный комплекс). Многие БАС и БАК считают синонимами, однако между ними есть некоторая разница, которая заключается в том, что БАС является более широким понятием [64]. БАК – это только совокупность материально-технических средств, необходимых для выполнения определенных функций. Однако эти функции выполнены быть не могут без наличия элементов, устанавливающих связи различного типа (информационные, информационно-управляющие и т.п.) между структурными элементами комплекса. Наличие таких элементов и таких связей является отличительной особенностью БАС. Таким образом, кроме всего того, что входит в БАК, в БАС должны быть включены еще: технический персонал, протоколы обмена информацией, нормативно-регламентирующая документация, средства интеграции с другими системами.
| Таблица 1.2 Основные англоязычные термины в области БПЛА и их русскоязычные соответствия | |
|---|---|
| UAV — Unmanned Aerial Vehicle, Uninhabited Aerial Vehicle | БПЛА (БЛА) — беспилотный летательный аппарат |
| drone | дрон, беспилотник |
| flying robot | воздушный робот |
| ROA — Remotely Operated Aircraft, RPA — Remote Piloted Aircraft | ДПЛА — дистанционно-пилотируемый летательный аппарат |
| UAS — Unmanned Aerial System | БАС — беспилотная авиационная система, |
| БАК — беспилотный авиационный комплекс | |
Следующая глава >
info.wikireading.ru
1.2.2.4. БПЛА с машущим крылом. Беспилотная авиация: терминология, классификация, современное состояние
1.2.2.4. БПЛА с машущим крылом
БПЛА с машущим крылом (flapping-wing UAV) основаны на бионическом принципе – копировании движений, создаваемых в полете летающими живыми объектами – птицами и насекомыми.
Хотя в этом классе БПЛА пока нет серийно выпускаемых аппаратов и практического применения они пока не имеют, во всем мире проводятся интенсивные исследования в этой области. В последние годы появилось большое количество разных интересных концептов малых БПЛА с машущим крылом.
Главные преимущества, которые имеют птицы и летающие насекомые перед существующими типами летательных аппаратов – это их энергоэффективность и маневренность. Если разработчикам «машущих» БПЛА удастся по показателям энергоэффективности и маневренности приблизиться к тому, что уже имеется в живой природе, то тогда их усилия будут не напрасными, и можно ожидать, что этот класс аппаратов начнет находить свое применение.
Аппараты, основанные на имитации движений птиц, получили название орнитоптеров (англ.: omithopter), а аппараты, в которых копируются движения летающих насекомых – энтомоптерами (англ.: entomopter) [43].
Орнитоптеры.
При создании БПЛА, имитирующих движения птиц, много внимания уделяется механическому приводу крыльев. Механические передачи должны обеспечивать необходимый набор движений и при этом быть простыми и легкими. Кроме махов вверх/вниз с нужной частотой, система управления движением в подходящие по внешним условиям моменты должна реализовывать режим парения, для того, чтобы аппарат мог максимально эффективно использовать набегающие и восходящие потоки воздуха.
Показательным примером в этой области является БПЛА SmartBird германской фирмой Festo, которая известна своими разработками в области бионики. Созданный ей аппарат внешне действительно очень похож на птицу (рис. 1.56). Он выполнен по образу и подобию реальной птицы – серебристой чайки, но несколько крупнее ее по габаритам. Аппарат способен не только собственно летать, но и совершать самостоятельные взлет и приземление. Крылья SmartBird движутся не только вверх и вниз, но также и поворачиваются вокруг собственной оси, что обеспечивает движениям максимальную точность.
БПЛА SmartBird имеет длину 1 м, размах крыльев 2 м, массу 450 г. Питание осуществляется от литий-полимерной двухэлементной аккумуляторной батареи (7,4 В). Потребляемая мощность в режиме выполнения маховых движений всего 23 Вт, в режиме парения еще меньше – 18 Вт.
Аппараты, подобные описанному, в скором времени вполне смогут найти свое место на рынке БПЛА. Военные ведомства различных стран уже оценили очевидные достоинства этих аппаратов при выполнении разведывательных и диверсионных операций.

Рис. 1.56. Орнитоптер SmartBird компании Festo (Германия, 2011): а – создатели аппарата; б – вид сзади; в – демо-макет механических передач; г – различные фазы полета
Энтомоптеры.
БПЛА, имитирующие движения летающих насекомых, условно можно подразделить на имитаторы четырехкрылых и имитаторы двукрылых насекомых. Четырехкрылые (стрекозы, бабочки) совершают более сложные движения, чем двукрылые, и возможностей управления полетом у них гораздо больше. На рис. 1.57 показан пример четырехкрылого энтомоптера, разработанного компанией Festo.

Рис. 1.57. Эитомоитер Вionicopter компании Festo (Германия, 2013)
Длина корпуса аппарата составляет 44 см, размах крыльев 63 см. Крылья выполнены из углеродного волокна и полиэфирной плёнки. Показатель частоты взмахов крылом относительно невысокий – 15-20 Гц. Масса аппарата составляет всего 175 г.
Управление полётом робота осуществляется со смартфона. BionicOpter имеет встроенный ARM-микроконтроллер, обеспечивающий стабилизацию полёта. Аппарат оснащен одним основным электродвигателем и восемью сервоприводами. На борту имеется набор сенсоров для предотвращения столкновений с препятствиями. Схема питается от двухсекционного литийполимерного аккумулятора 7,4 В.
Конструкция BionicOpter обеспечивает этому аппарату множество возможностей маневрирования. Каждое крыло, кроме маховых движений, может совершать вращательные движения вокруг своей оси и угловые перемещения в горизонтальной плоскости. Кроме того, хвостовая часть может изгибаться, меняя положение центра тяжести. Благодаря таким возможностям управления, аппарат может, например, мгновенно зависать на месте и перемещаться в горизонтальной плоскости в любую сторону, не изменяя при этом угла тангажа.
Разработки БПЛА, имитирующие двукрылых насекомых, развиваются, в основном, в направлении микроминиатюризации аппаратов. Здесь все достижения, видимо, еще впереди. Развитие технологий новых сверхлегких материалов, источников питания, наноэлектроники и интеллектуального управления в ближайшие годы позволят создать микроминиатюрные насекомоподобные БПЛА, приближающиеся к живым существам и по выполняемым функциям, и по размеру. Появятся (уже появляются) новые концепции управления коллективами микророботов, перед которыми можно будет ставить цели, ранее не достижимые, т.к. эти формации воздушных микророботов будут обладать большими возможностями в силу таких их качеств, как коллективная живучесть, способность многовариантного решения задач, незаметность перемещений, способность к массированным и непрерывным миссиям и т.д.
Пример разработки миниатюрного двукрылого энтомоптера показан на рис. 1.58. Это микро-БПЛА Mobee (Monolithic Bee), разработанный Лабораторией микроробототехники Гарвардского университета (США). Его особенность в том, что он изготовлен по интегральной многослойной технологии. В основе – тонкая углепластиковая пластина, в которой лазером сделаны все необходимые вырезы, затем нанесено еще множество металлических и неметаллических слоев, формирующих необходимые электронные и микроэлектромеханические устройства, включая сенсоры, радиотехнические устройства и актуаторы крыльев [44].
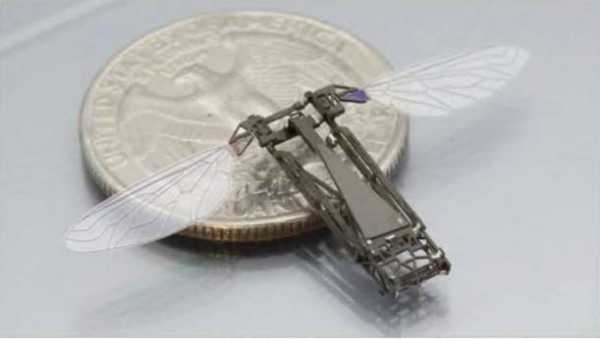
Рис. 1.58. Энтомоптер Mobee – разработка Harvard Microrobotics Lab (США, 2011)
Поделитесь на страничкеСледующая глава >
info.wikireading.ru
АвиаЭкспресс » БПЛА самолетного типа
.
Этот тип аппаратов известен также как БПЛА с жестким крылом (англ.: fixed-wing UAV). Подъемная сила у этих аппаратов создается аэродинамическим способом за счет напора воздуха, набегающего на неподвижное крыло. Аппараты такого типа, как правило, отличаются большой длительностью полета, большой максимальной высотой полета и высокой скоростью.
Существует большое разнообразие подтипов БПЛА самолетного типа, различающихся по форме крыла и фюзеляжа. Практически все схемы компоновки самолета и типы фюзеляжей, которые встречаются в пилотируемой авиации, применимы и в беспилотной.
На рис. 1.1 показан экспериментальный многоцелевой самолет Proteus разработки американской компании Scaled Composites. Разработаны как пилотируемый, так и беспилотный варианты этого самолета. Особенностью конструкции является тандемная схема расположения крыльев. Его длина составляет 17,1 м, размах задних крыльев 28 м, потолок высоты 16 км (при нагрузке 3,2 т), взлетная масса 5,6 т, максимальная скорость 520 км/ч (на высоте 10 км), длительность полета до 18 ч. Силовая установка – два турбореактивных двигателя с тягой по 10,2 кН .
На рис. 1.2 показан разведывательный БПЛА RQ-4 Global Hawk, разработанный американской фирмой Teledyne Ryan Aeronautical, дочерним предприятием компании Northrop Grumman. Он отличается необычной формой фюзеляжа, в носовой части которого размещено радиолокационное, оптическое и связное оборудование. Аппарат изготовлен из композитных материалов на основе углеволокна и аллюминиевых сплавов, имеет длину 13,5 м, размах крыльев 35 м, взлетную массу около 15 тонн, способен нести полезную нагрузку массой до 900 кг. RQ-4 Global Hawk может находиться в воздухе до 30 часов на высоте до 18 км. Максимальная скорость 640 км/ч. Силовая установка – турбореактивный двигатель с тяговым усилием 34,5 кН.
На рис. 1.3 показан перспективный боевой палубный БПЛА Х-47В, разрабатываемый компанией Northrop Grumman (США). Он имеет форму широко выгнутой буквы «V» без хвостовой части. Крылья могут складываться, что немаловажно для ограниченной площади палубы авианосца. Для управления полетом БПЛА оснащен 6-ю рабочими плоскостями. Турбореактивный двигатель канадской фирмы Pratt amp; Whitney обеспечивает высокую скорость полета беспилотного аппарата и расположен в задней части аппарата. Беспилотник состоит из четырех частей, собранных из композитных материалов и соединяющихся примерно в середине корпуса. Самолет имеет длину 11,6 м, размах крыльев 18,9 м (в сложенном состоянии 9,4 м), собственную массу 6,3 т, максимальную взлетную массу 20,2 т. Крейсерская скорость составляет 900 км/ч. Радиус действия 3900 км. Потолок 12,2 км. Предположительно аппарат будет приспособлен для выполнения дозаправки в воздухе. При этом БПЛА будет готов при необходимости беспрерывно выполнять поставленную боевую задачу в течение 80 часов, что на порядок больше длительности полёта боевых самолетов с пилотами [13].
Х-47В UCAS-D Air Vehicle System in Focus
Altitude: ›40,000 ft
Speed: High Subsonic
Weapons Payload Provisions: 4,500 lbs
Max Unrefueled Range: ›2,100 NM
Max Unrefueled Endurance: ›6 hours
Sensor Provisions: EO/IR/SAR/ESN
Air Refueling Provisions: USN/USAF
CV Demo TOGW: 44,567 lbs
CV Launch OPWOD: -3.6 kts
CV Recovery WOD: 9.3 kts
Spot Factor (F/A-18C): 0.87
На рис. 1.4 показан ударный БПЛА MQ-9 Reaper, разработанный американской компанией General Atomics и стоящий на вооружении ВВС США и других стран с 2007 г. Как и многие другие БПЛА, аппарат имеет V-образное оперение, состоящее из двух наклонных поверхностей, выполняющих функции и горизонтального, и вертикального оперения. Синхронное отклонение управляющих поверхностей играет роль руля высоты и управляет тангажом, а асинхронное руля направления и управляет рысканьем. Для беспилотников V-образное оперение представляется более экономичным решением, чем классическое. MQ-9 Reaper оснащен турбовинтовым двигателем, позволяющим развивать скорость более 400 км/ч. Практический потолок составляет 13 км. Максимальная продолжительность полёта равна 24 ч.
БПЛА тактического назначения Viking 300 разработки американской компании L-3 Unmanned Systems представлен на рис. 1.5. Он построен полностью из композитных материалов. Оснащен двухтактным двухцилиндровым двигателем внутреннего сгорания мощностью 25 л.с. с толкающим винтом. Причем винт расположен между основным крылом и хвостовым оперением, а не позади него, как в предыдущем примере. Модульная конструкция позволяет легко собирать и разбирать аппарат. Длительность полета составляет 8-10 ч при крейсерской скорости 100 км/ч. Максимальная взлетная масса 144 кг, а масса полезной нагрузки 13,5 кг. Радиус действия составляет 50-75 км. Особенностью аппарата является возможность осуществлять полностью автономные взлет и посадку, которые могут выполняться не только на бетонной полосе, но и на плохо подготовленных поверхностях.
Еще один пример (рис. 1.6) – это любительская разработка летающей радиоуправляемой модели с дисковым крылом. Аппарат отличается хорошей маневренностью и способность сохранять стабильность полета на малых скоростях.
В качестве движителей аппаратов самолетного типа обычно используются тянущие или толкающие винты, а также импеллеры (лопаточные машины, заключенные в цилиндрический кожух – англ.: impeller, ducted fan, shrouded propeller) или реактивные двигатели.
Для аппаратов самолетного типа обычно необходима взлетно-посадочная полоса (ВПП) (рис. 1.7 а). Для некоторых типов при взлете используют стартовые катапульты (рис. 1.7 б). Есть также самолетные БПЛА легкого класса, запускаемые «с руки» (рис. 1.7 в). При посадке может применяться ВПП, парашют (рис. 1.8) или специальные уловители (тросы, сетки, растяжки) (рис. 1.9).
Взлеты и посадки традиционных БПЛА самолетного типа – процесс достаточно трудоемкий и затратный, требующий наличия специальных вспомогательных средств (ВПП, устройств запуска и посадки), поэтому разработчики новой техники все чаще обращаются к нетрадиционным схемам самолетных БПЛА, позволяющим создать безаэродромные БАС. Речь идет прежде всего о самолетах вертикального взлета и посадки (СВВП). На сегодняшний день существует много разновидностей аппаратов ВВП [14, 15]. Многие из них являются гибридами самолетов и вертолетов, поэтому рассмотрены в следующих подразделах (см. далее – «Винтокрылы», «Конвертопланы»). Те же СВВП, которым в большей степени присущи свойства самолета, чем вертолета, обычно имеют в качестве движителя реактивный двигатель, импеллер или небольшие по размеру пропеллеры. Их условно можно разделить по положению фюзеляжа при взлете и посадке [16] на аппараты с вертикальным положением фюзеляжа (тэйлситтеры, от англ. – tailsitter) и аппараты с горизонтальным положением фюзеляжа.
Тэйлситтер ы в стартовом положении обычно опираются хвостовой частью на грунт. Если в качестве движителя используются тянущие винты, то они располагаются в носовой части (как в примере, показанном на рис. 1.10). Посадка, как и взлет, у таких аппаратов обычно производится вертикально. Самое сложное для СВВП – это переход с вертикальной фазы полета на горизонтальную и обратно. У показанного на рис. 1.10 БПЛА SkyTote, например, для управления полетом в этих фазах используется даже специальный нейросетевой контроллер [17].
В последнее время в тэйлситтерах все чаще в качестве движителей используют импеллеры, особенно если движитель является толкающим и находится в хвостовой части аппарата, – это энергетически выгоднее обычного пропеллера [18]. Примером может служить разработка группы исследователей южнокорейского института KAIST (Korea Advanced Institute of Science and Technology) (рис. 1.11). У представленного беспилотного тэйлситтера предусмотрена возможность взлета и посадки как вертикально, так и горизонтально (т.е. по-самолетному – на ВПП) [19].
Особой разновидностью тэйлситтеров можно считать т.н. колъцепланы (или колеоптеры) – летательные аппараты с крылом, имеющим при виде спереди правильную кольцевую форму. Внутренняя полость кольцевого крыла обдувается воздушной струёй, отбрасываемой двумя соосными винтами противоположного вращения, расположенными на входе в крыло. Хвостовое оперение в конце короткого фюзеляжа и управляющие элероны, установленные на двух профилированных пилонах, крепящих кольцевое крыло к фюзеляжу, находятся в зоне интенсивного обдува струёй от винтов, что повышает их эффективность. В 1959 во Франции фирмой SNECMA был построен экспериментальный пилотируемый кольцеплан с турбореактивным двигателем и проведены его испытания в вертикально подвешенном состоянии (рис. 1.12). При попытке перейти к горизонтальному полету произошло крушение и после этого проект был закрыт [20].
Однако в наши дни кольцепланы получили новое развитие, но уже в виде беспилотных аппаратов. На рис. 1.13 показаны примеры многофункциональных БПЛА, выполненных по схеме кольцеплана. Кольцевое замкнутое крыло имеет свои преимущества (нет срыва потока по краям, допускаются очень большие углы атаки, большая маневренность, большая прочность и меньшая масса крыла, хорошее соотношение массы полезной нагрузки к общей массе аппарата).
Приведенные в качестве примеров на рис. 1.13 БПЛА предназначены, в первую очередь для видеонаблюдения, причем они могут работать в сложных условиях – внутри строений, лесных массивов, горных ущелий и пещер: защищенность вентилятора корпусом-крылом делает эксплуатацию безопасной и устойчивой к контакту с препятствиями. Вертикальный взлет/посадка делают возможным применение БПЛА с ограниченных площадок и транспортных средств. Оба аппарата работают от двигателей внутреннего сгорания (в российском предусмотрен также вариант с электромотором и аккумулятором) и могут развивать горизонтальную скорость порядка 150 км/ч.
В последние годы появляются сообщения о возобновившихся и небезнадежных попытках создать самолет обычного (не вертикального) способа взлета/посадки с замкнутым крылом. Группа энтузиастов в Белоруссии в 2007 г. испытала самолет с таким крылом. Выяснено, что в поперечном сечении он должен иметь не кольцевую форму, а форму эллипса. Прототип оказался в воздухе очень стабильным, маневренным и экономичным, а длина его пробега по ВПП при взлете/посадке заметно короче, чем, например у биплана такого же размера. Можно ожидать, что вскоре появятся и беспилотные самолеты, реализующие описанную концепцию [21].
СВВП с горизонтальным положением фюзеляжа на взлете/ посадке исторически раньше были реализованы в военной пилотируемой авиации. Наиболее известные СВВП этого класса – это серийно производимые штурмовики: советский Як-38 разработки ОКБ им. Яковлева и американский AV-8B Harrier разработки фирмы McDonnell Douglas (рис. 1.14). Силовая установка Як-38 состоит из одного реактивного подъемно-маршевого двигателя и двух подъемных двигателей, а у AV-8B она состоит из одного мощного подъемно-маршевого двигателя. Управление вектором тяги при смене режима полета осуществляется с помощью поворотных реактивных сопел [22]. Главное достоинство таких СВВП очевидно – возможность базирования на ограниченных по площади полосах, в частности, на палубах авианосцев. Кроме того, СВВП обладают дополнительными преимуществами, а именно возможностью зависания, разворота в этом положении и полёта в боковом направлении. По отношению к другим вертикально взлетающим летательным аппаратам, например, вертолётам, СВВП обладают несравненно большими скоростями и в целом преимуществами, свойственными летательным аппаратам с неподвижным крылом. Недостатками таких самолетов являются сложность управления и энергетическая неэффективность.
Беспилотные СВВП с горизонтальным положением фюзеляжа на взлете/посадке стали появляться только в последние 10 лет. Один из примеров – разработка американской компанией American Dynamics военного беспилотного СВВП BattleHog 100х (рис. 1.15).
Летные испытания БПЛА BattleHog 100х прошли в 2006 г. Аппарат мог находиться в воздухе непрерывно до 8 часов. Длина BattleHog 100х составляет 3,8 м, размах крыльев – 5,2 м, высота – 1,5 м, максимальный взлетный вес – 1450 кг, полезная нагрузка – 340 кг, потолок высоты – около 7 тыс. м, максимальная скорость – 500 км/ч, крейсерская – 330 км/ч. Расчет станции управления – от 1 до 3 чел. Дальность передачи данных по каналу прямой видимости – около 250 км. BattleHog 100х оснащен турбовентиляторным двигателем Rolls Royce Т63-А720. Аппарат может действовать как в режиме вертикального взлета и посадки, так и в режиме обычного самолетного взлета и посадки [23]. Разработка BattleHog 100х была ориентирована на использование его в боях в городе или сильнопересеченной местности.
Аппарат BattleHog 100х предположительно должен быть оснащен двумя ракетами HellFire, либо пусковыми установками НУРС и артиллерийской системой M134 . Бронирование кевларом призвано защитить подъемный вентилятор от пуль калибра 7,62 мм на дистанции до 50 м, а также от воздействия разрывов гранат в непосредственной близости от аппарата [24].
В ходе испытаний в лесу аппарат продемонстрировал возможность совершать полет ниже уровня верхушек деревьев, что позволяет обеспечить его крайне низкую заметность. Полет с огибанием рельефа местности, между деревьями или зданиями осуществляется с помощью модифицированного радара Raytheon. Управление летательным аппаратом осуществляется путем изменения скорости вращения и угла наклона подъемного вентилятора с высоким крутящим моментом (High Torque Aerial Lift, HTAL). Его применение, во-первых, позволило резко уменьшить габариты роторов, «спрятав» их внутрь фюзеляжа, что одновременно позволило снизить их уязвимость от огня противника. С другой стороны, система HTAL позволила обеспечить BattleHog 100х не только высокую грузоподъемность, но и возможность вертикального взлета и посадки, зависания и полета с предельно малыми скоростями, а также, по заверению разработчиков, уникальную маневренность аппарата без использования аэродинамических управляющих поверхностей – рулей поворота и элеронов (что также снижает уязвимость) или сложных систем управления вектором тяги, используемых в современных военных СВВП.
Другим примером беспилотного СВВП с горизонтальным расположением фюзеляжа является аппарат Excalibur американской фирмы Aurora Flight Sciences (рис. 1.16). Он имеет разворачиваемый подъемно-маршевый газотурбинный двигатель, а для управления положением используются электрические импеллеры, расположенные в крыльях и носовой части. Данный БПЛА также предназначен для применения в качестве штурмовика и рассчитан на подвеску различного ракетного и стрелкового вооружения [25].
И еще один пример БПЛА этого же подкласса – аппарат V-STAR компании Frontline Aerospace (США). Он имеет несколько модификаций, некоторые из которых показаны на рис. 1.17.
V-STAR проектировался как боевая машина универсального применения: для разведки, слежения, целеуказания и поиска; для ударов по наземным объектам с помощью устанавливаемого на борту оружия; для доставки на поле боя и за линию фронта оружия, боеприпасов, продовольствия, медикаментов и т.д.; для эвакуации раненых и др. За свои эксплуатационные характеристики БПЛА V-STAR получил неофициальное название «Humvee of the air» («воздушный хаммер» – по аналогии с известным американским вездеходом). Основные особенности этого аппарата [26]:
– 2 компактных газотурбинных двигателя Rolls-Royce 250. Передача движения осуществляется как на подъемный вентилятор, расположенный в центре фюзеляжа, так и на маршевый толкающий вентилятор в хвостовой части. При выходе из строя одного двигателя аппарат может продолжить полет и совершить посадку на оставшемся. В штатном режиме оба двигателя работают одновременно лишь на взлёте, когда нужно оторвать аппарат от земли. При горизонтальном полёте маршевый вентилятор приводит во вращение лишь один двигатель, а второй в это время не работает, экономя топливо;
– особая технология энергосбережения делает аппарат эффективным при перевозке грузов и пригодным для длительных полетов на дальние расстояния: V-STAR рассчитан на перевозку грузов до 180 кг при максимальном взлетном весе 1,06 т. Наибольшая скорость 533 км/ч. Дальность полёта 1316 км с полной нагрузкой, при уменьшении массы груза до 15 кг дальность увеличивается до 5570 км. Длительность полета (при нагрузке 50 кг) составляет порядка 20 ч;
– груз в машине располагается в центре тяжести агрегата (внутри цилиндрического отсека, вокруг которого вращаются лопасти подъёмного вентилятора), поэтому загрузка/разгрузка не нарушает центровки аппарата;
– особая конструкция крыльев. Основные крылья – ромбовидная «этажерка», которая обеспечивает устойчивый горизонтальный полет, и в то же время не ограничивает скороподъемность. На законцовках могут раскладываться дополнительные короткие крылья для увеличения грузоподъемности на малой скорости;
– вертикальные взлет/посадка или обычные самолетные взлет/посадка с укороченным пробегом по полосе. В полете – способность быстро переключаться от медленного барражирования к мгновенному броску в сторону цели;
– БПЛА V-STAR имеет очень высокий показатель транспортной результативности, который вычисляется как произведение скорости, дальности полёта и полезной нагрузки, деленное на полный взлётный вес. По этому показателю аппарат опережает многие БПЛА самолетного и вертолетного типов.
В заключение темы аппаратов самолетного типа с вертикальным взлетом и посадкой необходимо упомянуть о существовании еще одного особого вида БПЛА – аппаратах с жестким зонтообразным крылом, основанных на эффекте Коанды. Хотя эти аппараты мало похожи на самолеты, по принципу полета они все же больше всего соответсвуют этой классификационной группе.
Эффект Коанды – физическое явление, названное так, потому что в 1932 году румынский учёный Анри Коанда обнаружил, что поток жидкости или газа стремится отклониться по направлению к стенке тела с криволинейной поверхностью и при определенных условиях прилипает к ней, вместо того, чтобы продолжать движение в начальном направлении. Действие эффекта Коанды проявляется тогда, когда подача слоя воздуха на поверхность производится через узкую щель. Этот тонкий скоростной слой захватывает окружающий воздух. В итоге создается т.н. настилающая струя – полуограниченная струя, которая всегда развивается только вдоль поверхности ограждения. Дальность распространения настилающей струи увеличивается приблизительно в 1,2 раза по сравнению со стеснённой струей (т.е. струей, ограниченной со всех сторон, как в трубе). Таким образом, струя, которая настилается на поверхность, имеет большую дальнобойность при остальных одинаковых условиях, чем струя ненастилающая [27].
Летательный аппарат на эффекте Коанды устроен довольно просто: над зонтообразной поверхностью установлен вентилятор или реактивный двигатель, создающий поток воздуха, выходящий через узкую щель и настилающий криволинейную поверхность. Результаты моделирования скорости потока показаны на рис. 1.18.
В последние годы ряд исследователей и фирм провели достаточно удачные эксперименты по реализации эффекта Коанды применительно к построению БПЛА. Так, в Великобритании фирмой AESIR [28] испытан экспериментальный аппарат Embler, демонстрирующий возможности использования эффекта. Аппарат выполнен из углепластикового корпуса. Привод вентилятора – электромотор. Аппарат может находиться в воздухе до 10 мин. Управление направлением движения в этом БПЛА осуществляются с помощью управляемых заслонок в выходной щели вентиляторного канала (управление рысканьем), а также с помощью четырех закрылков у кромки зонтообразной поверхности (управление креном и тангажом).
Компания AESIR объявила также о своих планах построения целой линейки аппаратов на эффекте Коанды [29]. Они отличаются своими размерами и грузоподъемностью. Самый крупный из них, названный Hoder, показан на рис. 1.20. Этот БПЛА имеет 2 вентиляторных движителя, приводимых в движение от двигателей внутреннего сгорания. Угол расположения лопаток вентиляторов сделан регулируемым. В отличие от прототипа, показанного на рис. 1.19, у БПЛА Hoder обтекаемые поверхности сделаны вообще без всяких аэродинамических элементов управления. А управление движением осуществляется путем изменения соотношения параметров вращения и углов лопаток вентиляторов. Собственная масса аппарата 1500 кг, масса полезной нагрузки 500 кг. БПЛА предназначен для выполнения локальных транспортных миссий продолжительностью до 8 ч. Такой аппарат имеет преимущество при использовании по сравнению с обычными вертолетами в городских условиях, лесистой и горной местности, где велика вероятность повреждения несущего винта вертолета. У предлагаемого аппарата небольшие столкновения с препятствиями не могут нарушить его работу.
Это дешевые и экономичные летательные аппараты аэродинамического типа, в которых в качестве несущего крыла используется не жесткая, а гибкая (мягкая) конструкция, выполненная из ткани, эластичного полимерного материала или упругого композитного материала, обладающего свойством обратимой деформации.
В этом классе БПЛА можно выделить беспилотные моторизованные парапланы, дельтапланы и БПЛА с упруго деформируемым крылом.
Беспилотный моторизованный параплан – аппарат на основе управляемого парашюта-крыла, снабжённый мототележкой с воздушным винтом для автономного разбега и самостоятельного полёта. Крыло обычно имеет форму прямоугольника или эллипса. Крыло может быть мягким, иметь жесткий или надувной каркас. Пример – разработки американской фирмы Atair Aerospace, которая предложила серию беспилотных парапланов под общим названием LEAPP (Long Endurance Autonomous Powered Paraglider) (рис. 1.21). Их основное достоинство – экономичность. Они снабжены двигателями внутреннего сгорания и способны длительное время медленно барражировать над объектом, производя, например, видеосъемку. Для запуска требуется площадка длиной 2-3 м для короткого разбега. Модель Micro LEAPP является компактной модификацией, которую может обслуживать один человек (предусмотрена переноска аппарата в заплечном ранце) [30]. Недостатком беспилотных моторизованных парапланов является трудность управления ими, так как навигационные датчики не имеют жесткой связи с крылом. Ограничение на их применение оказывает также очевидная зависимость от погодных условий.
Беспилотный моторизованный дельтаплан – это аппарат на основе мягкого крыла дельтавидной формы. Такое крыло представляет собой три жесткие направляющие, соединённые между собой в передней точке и образующие в горизонтальной плоскости веер, с углом между трубами 90-140 градусов. Между трубами натянута прочная ткань. Две боковые направляющие и задняя кромка ткани образуют при виде сверху почти треугольник. Крыло крепится на тележку, на которой смонтированы двигатель с винтом (тянущим или толкающим) и аппаратура (рис. 1.22). Управление полётом осуществляется обычно с помощью дополнительных аэродинамических элементов, небольшой деформации крыла или с помощью перемещаемого центра тяжести.
Скорость современных дельтапланов составляет от 25 км/ч до 100-130 км/ч, высота полётов достигает 6 км и более. По сравнению с беспилотными мотопарапланами мотодельтапланы значительно проще и стабильнее в управлении благодаря наличию жестких связей крыла с остальной конструкцией.
Преимущество мотодельтаплана по отношению к другим БПЛА заключается в простоте и надёжности конструкции, дешевизне и компактности в сложенном виде (рис. 1.23), минимальной необходимой длине площадки для взлёта и посадки, бесшумности, отсутствию влияния вибраций от ротора несущего винта на аэродинамические элементы конструкции [31].
БПЛА с упруго деформируемым крылом.
Крыло в аппаратах такого типа выполняется из композитного материала с большой степенью упругости. Это позволяет сворачивать крыло без опасения потерять его форму (рис. 1.24, а).
Оно также хорошо противостоит соударениям с землей и препятствиями. Примером может служить БПЛА Maverick – компактный и очень легкий электрический летательный аппарат, разработанный американской компанией Prioria Robotics [32]. Гибкое упругое крыло позволяет размещать Maverick в небольшом тубусе диаметром 15 см. Кроме того, по заявлению авторов, такое крыло способно частично компенсировать порывы ветра и улучшать стабильность полета. Аппарат оснащен камерой для видео и фото съемки. Запуск БПЛА может производиться как «с руки», так и с помощью специальной пневматической катапульты. После вылета из катапульты аппарат разворачивает крылья (рис. 1.24, б, в). Гибкое крыло не имеет элеронов, поэтому управление осуществляется с помощью небольших аэродинамических рулей в хвостовой части. БПЛА Maverick имеет массу 1,16 кг, радиус действия до 5 км и способен находиться в воздухе от 45 до 90 минут, совершая полет со скоростью от 40 до 100 км/ч.
Комментарии закрыты.
dostavistaexpress.ru