
РЛС — это… Что такое РЛС?
Радиолокационная станция (РЛС) или рада́р (англ. radar от Radio Detection and Ranging — радиообнаружение и дальнометрия) — система для обнаружения воздушных, морских и наземных объектов, а также для определения их дальности и геометрических параметров. Использует метод, основанный на излучении радиоволн и регистрации их отражений от объектов. Английский термин-акроним появился в 1941 г., впоследствии в его написании прописные буквы были заменены строчными.
История
В 1887 году немецкий физик Генрих Герц начал эксперименты, в ходе которых он открыл существование электромагнитных волн, предсказанных теорией Джеймса Максвелла. Герц научился генерировать и улавливать электромагнитные радиоволны и обнаружил, что они по-разному поглощаются и отражаются различными материалами.
Одно из первых устройств, предназначенных для радиолокации воздушных объектов продемонстрировал 26 февраля 1935 г. шотландский физик Роберт Ватсон-Ватт, который примерно за год до этого получил первый патент на изобретение подобной системы.
Россия
В Советском Союзе осознание необходимости средств обнаружения авиации, свободных от недостатков звукового и оптического наблюдения, привела к разворачиванию исследований в области радиолокации. Идея, предложенная молодым артиллеристом Павлом Ощепковым получила одобрение высшего командования: наркома обороны СССР К. Е. Ворошилова и его заместителя — М. Н. Тухачевского.
3 января 1934 года в СССР был успешно проведён эксперимент по обнаружению самолёта радиолокационным методом. Самолёт, летящий на высоте 150 метров был обнаружен на дальности 600 метров от радарной установки. Эксперимент был организован представителями Ленинградского Института Электротехники и Центральной Радиолаборатории. В 1934 году маршал Тухачевский в письме правительству СССР написал: «Опыты по обнаружению самолётов с помощью электромагнитного луча подтвердили правильность положенного в основу принципа». Первая опытная установка «Рапид» была опробована в том же же году [1][2], в 1936 году советская сантиметровая радиолокационная станция «Буря» засекала самолёт с расстояния 10 километров[1][3]. В США первый контракт военных с промышленностью был заключён в 1939 году. В 1946 году американские специалисты — Реймонд и Хачертон, бывший сотрудник посольства США в Москве, написали: «Советские учёные успешно разработали теорию радара за несколько лет до того, как радар был изобретён в Англии».[4]
Классификация радаров
По предназначению радиолокационные станции можно классифицировать следующим образом:
- РЛС обнаружения;
- РЛС управления и слежения;
- Панорамные РЛС;
- РЛС бокового обзора;
- Метеорологические РЛС.
По сфере применения различают военные и гражданские РЛС.
По характеру носителя:
- Наземные РЛС
- Морские РЛС
- Бортовые РЛС
По типу действия
- Первичные или пассивные
- Вторичные или активные
- Совмещённые
По диапазону волн:
- Метровые
- Сантиметровые
- Миллиметровые
Устройство и принцип действия Первичного радиолокатора
Первичный (пассивный) радиолокатор, в основном, служит для обнаружения целей, освещая их электромагнитной волной и затем принимая отражения (эхо) этой волны от цели. Поскольку скорость электромагнитных волн постоянна (скорость света), становится возможным определить расстояние до цели, основываясь на измерении времени распространения сигнала.
В основе устройства радиолокационной станции лежат три компонента: передатчик, антенна и приёмник.
Передающее устройство является источником электромагнитного сигнала высокой мощности. Он может представлять из себя мощный импульсный генератор. Для импульсных РЛС сантиметрового диапазона — обычно магнетрон или импульсный генератор работающий по схеме: задающий генератор — мощный усилитель, использующий в качестве генератора чаще всего лампу бегущей волны, а для РЛС метрового диапазона, часто используют — триодную лампу. В зависимости от конструкции, передатчик работает либо в импульсном режиме, формируя повторяющиеся короткие мощные электромагнитные импульсы, либо излучает непрерывный электромагнитный сигнал.
Антенна выполняет фокусировку сигнала приёмника и формирование диаграммы направленности, а также приём отражённого от цели сигнала и передачу этого сигнала в приёмник. В зависимости от реализации приём отражённого сигнала может осуществляться либо той же самой антенной, либо другой, которая иногда может располагаться на значительном расстоянии от передающего устройства. В случае, если передача и приём совмещены в одной антенне, эти два действия выполняются поочерёдно, а чтобы мощный сигнал, просачивающийся от передающего передатчика в приёмник не ослепил приёмник слабого эха, перед приёмником размещают специальное устройство, закрывающее вход приёмника в момент излучения зондирующего сигнала.
Приёмное устройство выполняет усиление и обработку принятого сигнала. В самом простом случае результирующий сигнал подаётся на лучевую трубку (экран), которая показывает изображение, синхронизированное с движением антенны.
Когерентные РЛС
Когерентный метод радиолокации основан на выделении и анализе разности фаз отправленного и отражённого сигналов, которая возникает из-за эффекта Доплера, когда сигнал отражается от движущегося объекта. При этом передающее устройство может работать как непрерывно, так и в импульсном режиме. Основным преимуществом данного метода является то, что он «позволяет наблюдать только движущиеся объекты, а это исключает помехи от неподвижных предметов, расположенных между приёмной аппаратурой и целью или за ней.»[5]
Импульсные РЛС
Принцип действия импульсного радара
Принцип определения расстояния до объекта с помощью импульсного радара
Современные радары сопровождения построены как импульсные радары. Импульсный радар передаёт только в течение очень краткого времени, короткий импульс обычно приблизительно микросекунда в продолжительности, после чего он слушает эхо, в то время как импульс распространяется.
Поскольку импульс уходит далеко от радара с постоянной скоростью, время прошедшее с момента, когда импульс посылали, ко времени когда эхо получено, — ясная мера прямого расстояния до цели. Следующий импульс можно послать только через некоторое время, а именно после того как импульс придёт обратно, это зависит от дальности обнаружения радара (данным мощностью передатчика, усилением антенны и чувствительностью приёмника). Если бы импульс посылали раньше, то эхо предыдущего импульса от отдалённой цели могло бы быть перепутано с эхом второго импульса от близкой цели.
Промежуток времени между импульсами называют интервалом повторения импульса, обратная к нему величина — важный параметр, который называют частотой повторения импульса (ЧПИ) . Радары низкой частоты дальнего обзора, обычно имеют интервал повторения в несколько сотен импульсов в секунду (или Герц [Гц]). Частота повторения импульсов является одним из отличительных признаков, по которым возможно дистанционное определение модели РЛС.
Устранение пассивных помех
Одной из основных проблем импульсных РЛС является избавление от сигнала, отражающегося от неподвижных объектов: земной поверхности, высоких холмов и т. п. Если к примеру, самолёт находится на фоне высокого холма, отражённый сигнал от этого холма полностью перекроет сигнал от самолёта. Для наземных РЛС эта проблема проявляется при работе с низколетящими объектами. Для бортовых импульсных РЛС она выражается в том, что отражение от земной поверхности затеняет все объекты, лежащие ниже самолёта с радиолокатором.
Методы устранения помех используют, так или иначе, эффект Доплера (частота волны, отражённой от приближающегося объекта, увеличивается, от уходящего объекта — уменьшается).
Самый простой радар, который может обнаружить цель в помехах — радар с селекцией движущихся целей (СДЦ) — импульсный радар, который сравнивает отражения более чем от двух или больше интервалов повторения импульса. Любая цель, которая, движется относительно радара, производит изменение в параметре сигнала (стадия в последовательном СДЦ), тогда как помехи остаются неизменными. Устранение помех происходит путём вычитания отражений из двух последовательных интервалов. На практике устранение помех может быть осуществлено в специальных устройствах — черезпериодных компенсаторах или алгоритмами в программном обеспечении.
СДЦ, работающие с постоянной частотой повторения импульсов, имеют фундаментальную слабость: они являются слепыми к целям со специфическими круговыми скоростями (которые производят изменения фаз точно в 360 градусов), и такие цели не отображаются. Скорость, при которой цель исчезает для радиолокатора, зависит от рабочей частоты станции и от частоты повторения импульсов. Современные СДЦ излучают несколько импульсов с различной частоты повторения — такой, что невидимые скорости в каждой частоте повторения импульсов охвачены другими ЧПИ.
Другой способ избавления от помех реализован в импульсно-доплеровских РЛС, которые используют существенно более сложную обработку чем РЛС с СДЦ.
Важное свойство импульсно-доплеровских РЛС — это когерентность сигнала. Это значит, что посланные сигналы и отражения должны иметь определённую фазовую зависимость.
Импульсно-доплеровские РЛС обычно считаются лучше РЛС с СДЦ при обнаружении низколетящих целей во множественных помехах земли, это — предпочтительная техника, используемая в современном истребителе, для воздушного перехвата/управления огнём, примеры тому AN/APG-63, 65, 66, 67 и 70 радары. В современном доплеровском радаре большинство обработки выполняется отдельным процессором в цифровом виде с помощью цифровых сигнальных процессоров, обычно используя высокопроизводительный алгоритм Быстрое преобразование Фурье для преобразования цифровых данных образцов отражений кое во что более управляемое другими алгоритмами. Цифровые обработчики сигналов очень гибки и используемые алгоритмы могут обычно быстро заменяться другими, заменяя только память (ПЗУ) чипы, таким образом быстро противодействуя техники глушения противника если необходимо.
Устройство и принцип действия Вторичного радиолокатора
Принцип действия вторичного радиолокатора несколько отличается, от принципа Первичной радиолокации. В основе устройства Вторичной радиолокационной станции лежат компоненты: передатчик, антенна, генераторы азимутальных меток, приёмник, сигнальный процессор, индикатор и самолётный ответчик с антенной.
Передатчик. Служит для излучения импульсов запроса в антенну на частоте 1030 МГц
Антенна. Служит для излучения и приёма отражённого сигнала. По стандартам ICAO для вторичной радиолокации, антенна излучает на частоте 1030МГц, и принимает на частоте 1090 МГц.
Генераторы Азимутальных меток. Служат для генерации Азимутальных меток (Azimuth Change Pulse или ACP) и генерации Метки Севера (Azimuth Reference Pulse или ARP). За один оборот антенны РЛС генерируется 4096 малых азимутальных меток(для старых систем), или 16384 Малых азимутальных меток (для новых систем), их ещё называет улучшенные малые азимутальные метки (Improved Azimuth Change pulse или IACP), а также одну метку Севера. Метка севера приходит с генератора азимутальных меток, при таком положении антенны, когда она направлена на Север, а малые азимутальные метки служат для отсчёта угла разворота антенны.
Приёмник. Служит для приёма импульсов на частоте 1090 МГц
Сигнальный процессор. Служит для обработки принятых сигналов
Индикатор Служит для индикации обработанной информации
Самолётный ответчик с антенной Служит для передачи импульсного радиосигнала, содержащего дополнительную информацию, обратно в сторону РЛС при получении радиосигнала запроса.
Принцип Действия Принцип действия вторичного радиолокатора заключается в использовании энергии самолётного ответчика, для определения положения Воздушного судна. РЛС облучает окружающее пространства запросными импульсами на частоте P1 и P3, а также импульсом подавления P2 на частоте 1030 МГц. Воздушные суда оборудованные ответчиками находящиеся в зоне действия луча запроса при получении запросных импульсов, если действует условие P1,P3>P2 отвечают запросившей РЛС, Серией кодированных импульсов на частоте 1090 МГц, в которых содержится дополнительная информация типа Номер борта, Высота и так далее. Ответ самолётного ответчика зависит от режима запроса РЛС, а режим запроса определяется растоянием между запросными импульсами P1 и P3 например в режиме запроса А (mode A), расстояние между запросными импульсами станции P1 и P3 равно 8 микросекунд, и при получении такого запроса ответчик воздушного судна кодирует в импульсах ответа свой номер борта. В режиме запроса C (mode C) расстояние между запросными импульсами станции равно 21 микросекунде и при получении такого запроса ответчик воздушного судна кодирует в импульсах ответа свою высоту. Также РЛС может посылать запрос в смешанном режиме, например Режим А, Режим С, Режим А, Режим С. Азимут Воздушного судна определяется, углом поворота антенны, который в свою очередь определяется путём подсчёта Малых Азимутальных меток. Дальность определяется, по задержке пришедшего ответа Если Воздушное судно не лежит в зоне действия основного луча, а лежит в зоне действия боковых лепестков, или находится сзади антенны, то ответчик Воздушного судна при получении запроса от РЛС, получит на своём входе условие, что импульсы P1,P3<P2, то есть импульс подавления больше импульсов запроса. Учитываю этот фактор ответчик запирается и не отвечает на запрос. Принятый от ответчика сигнал принимается и обрабатывается приёмником РЛС, затем поступает на сигнальный процессор, который проводит обработку сигналов, и выдачу информации конечному потребителю, и или на контрольный индикатор.
Плюсы вторичной РЛС, более высокая точность, дополнительная информация о Воздушном Судне (Номер борта, Высота), а также малое по сравнению с Первичными РЛС излучение.
См. также
Другие страницы
Литература и сноски
- ↑ 1 2 Поляков В. Т. «Посвящение в радиоэлектронику», М., РиС, ISBN 5-256-00077-2
- ↑ передатчик был установлен на крыше дома 14 по Красноказарменной улице, Москва, приёмник — в районе посёлка Новогиреево; присутствовали М. Н. Тухачевский, Н.Н.Нагорный, М. В. Шулейкин. Аппаратуру демонстрировал П. К. Ощепков.
- ↑ Испытания в Евпатории, группа Б. К. Шембеля
- ↑ http://www.young-science.ru/index.php?option=com_content&task=view&id=215&Itemid=66
- ↑ Шембель Б. К. У истоков радиолокации в СССР. — Советское радио, 1977, № 5, с. 15-17.
Wikimedia Foundation. 2010.
dic.academic.ru
это… Определение, виды, принцип действия. Радиолокационная станция
Радиолокация — это совокупность научных методов и технических средств, служащих для определения координат и характеристик объекта посредством радиоволн. Исследуемый объект часто именуют радиолокационной целью (или просто целью).
Принцип радиолокации
Радиотехническое оборудование и средства, предназначенные для выполнения задач радиолокации, получили название радиолокационных систем, или устройств (РЛС или РЛУ). Основы радиолокации базируются на следующих физических явлениях и свойствах:
- В среде распространения радиоволны, встречая объекты с иными электрическими свойствами, рассеиваются на них. Волна, отраженная от цели (или ее собственное излучение), позволяет радиолокационным системам обнаружить и идентифицировать цель.
- На больших расстояниях распространение радиоволн принимается прямолинейным, с постоянной скоростью в известной среде. Это допущение делает возможным измерение дальности до цели и ее угловых координат (с определенной ошибкой).
- На основании эффекта Доплера по частоте принятого отраженного сигнала вычисляют радиальную скорость точки излучения относительно РЛУ.
Историческая справка
На способность радиоволн к отражению указывали великий физик Г. Герц и русский электротехник А.С. Попов еще в конце XIX века. Согласно патенту от 1904 года, первый радар создал немецкий инженер К. Хюльмайер. Прибор, названный им телемобилоскопом, использовался на судах, бороздивших Рейн. В связи с развитием авиационной техники применение радиолокации выглядело очень перспективным в качестве элемента противовоздушной обороны. Исследования в этой области велись передовыми специалистами многих стран мира.
В 1932 году основной принцип радиолокации описал в своих работах научный сотрудник ЛЭФИ (Ленинградского электрофизического института) Павел Кондратьевич Ощепков. Им же в сотрудничестве с коллегами Б.К. Шембель и В.В. Цимбалиным летом 1934 года был продемонстрирован опытный образец радиолокационной установки, обнаружившей цель на высоте 150 м при удалении 600 м. Дальнейшие работы по совершенствованию средств радиолокации сводились к увеличению дальности их действия и повышению точности определения местоположения цели.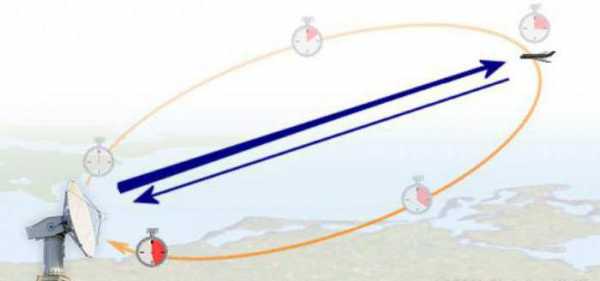
Виды радиолокации
Природа электромагнитного излучения цели позволяет говорить о нескольких видах радиолокации:
- Пассивная радиолокация исследует собственное излучение (тепловое, электромагнитное и т.п.), которое генерирует цели (ракеты, самолеты, космические объекты).
- Активная с активным ответом осуществляется в случае, если объект оборудован собственным передатчиком и взаимодействие с ним происходит по алгоритму «запрос — ответ».
- Активная с пассивным ответом предполагает исследование вторичного (отраженного) радиосигнала. Радиолокационная станция в этом случае состоит из передатчика и приемника.
- Полуактивная радиолокация — это частный случай активной, в случае когда приемник отраженного излучения расположен вне РЛС (например, является конструктивным элементом самонаводящейся ракеты).
Каждому виду свойственны свои достоинства и недостатки.
Методы и оборудование
Все средства радиолокации по используемому методу разделяют на РЛС непрерывного и импульсного излучения.
Первые содержат в своем составе передатчик и приемник излучения, действующие одновременно и непрерывно. По этому принципу были созданы первые радиолокационные устройства. Примером такой системы могут служить радиоальтиметр (авиационный прибор, определяющий удаление летательного аппарата от поверхности земли) или известный всем автолюбителям радар для определения скоростного режима транспортного средства.
При импульсном методе электромагнитная энергия излучается короткими импульсами в течение нескольких микросекунд. После генерации сигнала станция ведет работу только на прием. После улавливания и регистрации отраженных радиоволн РЛС передает новый импульс и циклы повторяются.
Режимы работы РЛС
Существует два основных режима функционирования радиолокационных станций и устройств. Первый — сканирование пространства. Он осуществляется по строго заданной системе. При последовательном обзоре перемещение луча радара может носить круговой, спиральный, конический, секторный характер. Например, решетка антенны может медленно поворачиваться по кругу (по азимуту), одновременно сканируя по углу места (наклоняясь вверх и вниз). При параллельном сканировании обзор осуществляется пучком радиолокационных лучей. Каждому соответствует свой приемник, ведется обработка сразу нескольких информационных потоков.
Режим слежения подразумевает постоянную направленность антенны на выбранный объект. Для ее поворота, согласно с траекторией движущейся цели, используются специальные автоматизированные следящие системы.
Алгоритм определения дальности и направления
Скорость распространения электромагнитных волн в атмосфере составляет 300 тыс. км/с. Поэтому, зная время, затраченное транслируемым сигналом на преодоление расстояния от станции до цели и обратно, легко вычислить удаленность объекта. Для этого необходимо точно зафиксировать время отправки импульса и момент принятия отраженного сигнала.
Для получения информации о местонахождении цели используется остронаправленная радиолокация. Определение азимута и элевации (угла места или возвышения) объекта производится антенной с узким лучом. Современные РЛС используют для этого фазированные антенные решетки (ФАР), способные задавать более узкий луч и отличающиеся высокой скоростью вращения. Как правило, процесс сканирования пространства совершается минимум двумя лучами.
Основные параметры систем
От тактических и технических характеристик оборудования во многом зависит эффективность и качество решаемых задач.
К тактическим показателям РЛС причисляют:
- Зону обзора, ограниченную минимальной и максимальной дальностью обнаружения цели, допустимым азимутальным углом и углом возвышения.
- Разрешающую способность по дальности, азимуту, элевации и скорости (возможность определять параметры рядом расположенных целей).
- Точность измерений, которая измеряется наличием грубых, систематических или случайных ошибок.
- Помехозащищенность и надежность.
- Степень автоматизации извлечения и обработки поступающего потока информационных данных.
Заданные тактические характеристики закладываются при проектировании устройств посредством определенных технических параметров, среди которых:
- несущая частота и модуляция генерируемых колебаний;
- диаграммы направленности антенн;
- мощность передающих и принимающих устройств;
- габаритные размеры и масса системы.

На боевом посту
Радиолокация — это универсальный инструмент, получивший широкое распространение в военной сфере, науке и народном хозяйстве. Области использования неуклонно расширяются благодаря развитию и совершенствованию технических средств и технологий измерений.
Применение радиолокации в военной отрасли позволяет решить важные задачи обзора и контроля пространства, обнаружения воздушных, наземных и водных мобильных целей. Без радаров невозможно представить оборудование, служащее для информационного обеспечения навигационных систем и систем управления орудийным огнем.
Военная радиолокация является базовой составляющей стратегической системы предупреждения о ракетном нападении и комплексной противоракетной обороны.
Радиоастрономия
Посланные с поверхности земли радиоволны также отражаются от объектов в ближнем и дальнем космосе, как и от околоземных целей. Многие космические объекты невозможно было полноценно исследовать лишь с использованием оптических инструментов, и только применение радиолокационных методов в астрономии позволило получить богатую информацию об их природе и структуре. Впервые пассивная радиолокация для исследования Луны была применена американскими и венгерскими астрономами в 1946 году. Примерно в то же время были случайно приняты и радиосигналы из космического пространства.
У современных радиотелескопов приемная антенна имеет форму большой вогнутой сферической чаши (подобно зеркалу оптического рефлектора). Чем больше ее диаметр, тем более слабый сигнал антенна сможет принять. Часто радиотелескопы работают комплексно, объединяя не только устройства, расположенные недалеко друг от друга, но и находящиеся на разных континентах. Среди важнейших задач современной радиоастрономии — изучение пульсаров и галактик с активными ядрами, исследование межзвездной среды.
Гражданское применение
В сельском и лесном хозяйстве радиолокационные устройства незаменимы при получении информации о распределении и плотности растительных массивов, изучении структуры, параметров и видов почв, своевременном обнаружении очагов возгораний. В географии и геологии радиолокация используется для выполнения топографических и геоморфологических работ, определения структуры и состава пород, поиска месторождений полезных ископаемых. В гидрологии и океанографии радиолокационными методами осуществляется контроль состояния главных водных артерий страны, снегового и ледяного покрова, картографирование береговой линии.
Радиолокация — это незаменимый помощник метеорологов. РЛС легко выяснит состояние атмосферы на удалении десятков километров, а по анализу полученных данных составляется прогноз изменения погодных условий в той или иной местности.
Перспективы развития
Для современной радиолокационной станции главным оценочным критерием выступает соотношение эффективности и качества. Под эффективностью понимаются обобщенные тактико-технические характеристики оборудования. Создание совершенной РЛС — сложная инженерная и научно-техническая задача, осуществление которой возможно только с использованием новейших достижений электромеханики и электроники, информатики и вычислительной техники, энергетики.
По прогнозам специалистов, в ближайшем будущем главными функциональными узлами станций самого разного уровня сложности и назначения будут твердотельные активные ФАР (фазированные антенные решетки), преобразующие аналоговые сигналы в цифровые. Развитие вычислительного комплекса позволит полностью автоматизировать управление и основные функции РЛС, предоставив конечному потребителю всесторонний анализ полученной информации.
fb.ru
Радиолокационные станции: история создания, описание и основные принципы работы

Современная война стремительна и быстротечна. Зачастую победителем в боевом столкновении выходит тот, кто первым сумеет обнаружить потенциальную угрозу и адекватно на нее среагировать. Уже более семидесяти лет для поиска противника на суше, море и в воздухе используется метод радиолокации, который основан на излучении радиоволн и регистрации их отражений от различных объектов. Устройства, посылающие и принимающие подобные сигналы, называются радиолокационными станциями (РЛС) или радарами.
Термин «радар» — это английская аббревиатура (radio detection and ranging), которая была запущена в оборот в 1941 году, но давно уже стала самостоятельным словом и вошла в большинство языков мира.
Изобретение радара – это, безусловно, знаковое событие. Современный мир трудно представить без радиолокационных станций. Их используют в авиации, в морских перевозках, с помощью РЛС предсказывается погода, выявляются нарушители правил дорожного движения, производится сканирование земной поверхности. Радиолокационные комплексы (РЛК) нашли свое применение в космической промышленности и в системах навигации.
Однако наиболее широкое применение радары нашли в военном деле. Следует сказать, что эта технология изначально создавалась для военных нужд и дошла до стадии практической реализации перед самым началом Второй мировой войны. Все крупнейшие страны-участницы этого конфликта активно (и не без результата) использовали радиолокационные станции для разведки и обнаружения судов и самолетов противника. Можно уверенно утверждать, что применение радаров решило исход нескольких знаковых сражений как в Европе, так и на Тихоокеанском театре боевых действий.
Сегодня РЛС используются для решения чрезвычайно широкого спектра военных задач, от отслеживания запуска межконтинентальных баллистических ракет до артиллерийской разведки. Каждый самолет, вертолет, военный корабль имеет собственный радиолокационный комплекс. Радары являются основой системы противовоздушной обороны. Новейший радиолокационный комплекс с фазированной антенной решеткой будет установлен на перспективный российский танк «Армата». Вообще же, многообразие современных радаров поражает. Это абсолютно разные устройства, которые отличаются размерами, характеристиками и назначением.

С уверенностью можно заявить, что сегодня Россия является одним из признанных мировых лидеров в области разработки и производства РЛС. Однако прежде чем говорить о тенденциях развития радиолокационных комплексов, следует несколько слов сказать о принципах работы радаров, а также об истории радиолокационных систем.
Как работает радиолокатор
Локацией называют способ (или процесс) определения месторасположения чего-либо. Соответственно, радиолокация – это метод обнаружения предмета или объекта в пространстве при помощи радиоволн, которые излучает и принимает устройство под название радиолокатор или РЛС.
Физический принцип работы первичного или пассивного радара довольно прост: он передает в пространство радиоволны, которые отражаются от окружающих предметов и возвращаются к нему в виде отраженных сигналов. Анализируя их, радар способен обнаружить объект в определенной точке пространства, а также показать его основные характеристики: скорость, высоту, размер. Любая РЛС – это сложное радиотехническое устройство, состоящее из многих компонентов.

В состав любого радара входит три основных элемента: передатчик сигнала, антенна и приёмник. Все радиолокационные станции можно разделить на две большие группы:
- импульсные;
- непрерывного действия.
Передатчик импульсной РЛС испускает электромагнитные волны в течение краткого промежутка времени (доли секунды), следующий сигнал посылается только после того, как первый импульс вернется обратно и попадет в приемник. Частота повторения импульса – одна из важнейших характеристик РЛС. Радиолокаторы низкой частоты посылают несколько сотен импульсов в минуту.
Антенна импульсного радара работает и на прием, и на передачу. После испускания сигнала передатчик отключается на время и включается приёмник. После его приема происходит обратный процесс.
Импульсные РЛС имеют как недостатки, так и преимущества. Они могут определять дальность сразу нескольких целей, подобный радар вполне может обходиться одной антенной, индикаторы подобных устройств отличаются простотой. Однако при этом сигнал, испускаемый подобным РЛС должен иметь довольно большую мощность. Также можно добавить, что все современные радары сопровождения выполнены по импульсной схеме.

В импульсных радиолокационных станциях в качестве источника сигнала обычно используют магнетроны или лампы бегущей волны.
Антенна РЛС фокусирует электромагнитный сигнал и направляет его, также она улавливает отраженный импульс и передает его в приемник. Существуют радиолокаторы, в которых прием и передача сигнала производятся разными антеннами, они могут находиться друг от друга на значительном расстоянии. Антенна РЛС способна испускать электромагнитные волны по кругу или работать в определенном секторе. Луч радара может быть направлен по спирали или иметь форму конуса. Если нужно РЛС может следить за движущейся целью, постоянно направляя на нее антенну с помощью специальных систем.
В функции приемника входит обработка полученной информации и передача ее на экран, с которого она считывается оператором.
Кроме импульсных РЛС, существуют и радары непрерывного действия, которые постоянно испускают электромагнитные волны. Такие радиолокационные станции в своей работе используют эффект Доплера. Он заключается в том, что частота электромагнитной волны, отраженной от объекта, который приближается к источнику сигнала, будет выше, чем от удаляющегося объекта. При этом частота испускаемого импульса остается неизменной. Радиолокаторы подобного типа не фиксируют неподвижные объекты, их приемник улавливает лишь волны с частотой выше или ниже испускаемой.
Типичным доплеровским радиолокатором является радар, который используют сотрудники дорожной полиции для определения скорости автомобилей.

Основной проблемой радаров непрерывного действия является невозможность с их помощью определять расстояние до объекта, зато при их работе не возникает помех от неподвижных предметов между РЛС и целью или за ней. Кроме того, доплеровские радары – это довольно простые устройства, которым для работы достаточно сигналов малой мощности. Также нужно отметить, что современные радиолокационные станции с непрерывным излучением имеют возможность определять расстояние до объекта. Для этого используется изменение частоты РЛС во время работы.
Одной из главных проблем в работе импульсных РЛС являются помехи, которые идут от неподвижных объектов, как правило, это земная поверхность, горы, холмы. При работе бортовых импульсных радаров самолетов все объекты, находящиеся ниже, затеняются сигналом, отраженным от земной поверхности. Если говорить о наземных или судовых радиолокационных комплексах, то для них эта проблема проявляется в обнаружении целей, летящих на малых высотах. Чтобы устранить подобные помехи используется все тот же эффект Доплера.
Кроме первичных РЛС, существуют и так называемые вторичные радиолокаторы, которые используются в авиации для опознания воздушных судов. В состав таких радиолокационных комплексов, кроме передатчика, антенны и приемного устройства, входит еще и самолетный ответчик. При облучении его электромагнитным сигналом ответчик выдает дополнительную информацию о высоте, маршруте, номере борта, его государственной принадлежности.

Также радиолокационные станции можно разделить по длине и частоте волны, на которой они работают. Например, для исследования поверхности Земли, а также для работы на значительных дистанциях используются волны 0,9—6 м (частота 50—330 МГц) и 0,3—1 м (частота 300—1000 МГц). Для управления за воздушным движением применяется РЛС с длиной волны 7,5—15 см, а загоризонтные радары станций обнаружения ракетных пусков работают на волнах с длиной от 10 до 100 метров.
История развития радиолокации
Идея радиолокации возникла практически сразу после открытия радиоволн. В 1905 году сотрудник немецкой компании Siemens Кристиан Хюльсмейер создал устройство, которое с помощью радиоволн могло обнаружить крупные металлические объекты. Изобретатель предлагал устанавливать его на кораблях, чтобы они могли избегать столкновений в условиях плохой видимости. Однако судовые компании не заинтересовались новым прибором.
Проводились эксперименты с радиолокацией и в России. Еще в конце XIX века русский ученый Попов обнаружил, что металлические объекты препятствуют распространению радиоволн.
В начале 20-х годов американские инженеры Альберт Тейлор и Лeo Янг сумели с помощью радиоволн засечь проплывающее судно. Однако состояние радиотехнической промышленности того времени было таково, что создать промышленные образцы радиолокационных станций было затруднительно.
Первые радиолокационные станции, которые можно было использовать для решения практических задач, появились в Англии примерно в середине 30-х годов. Эти устройства были очень большими, устанавливать их можно было только на суше или на палубе больших кораблей. Только в 1937 году был создан прототип миниатюрной РЛС, которую можно было установить на самолет. К началу Второй мировой войны англичане имели развернутую цепь радиолокационных станций под названием Chain Home.
Занимались новым перспективным направлением и в Германии. Причем нужно сказать, что небезуспешно. Уже в 1935 году главнокомандующему германского флота Редеру был продемонстрирован действующий радиолокатор с электронно-лучевым дисплеем. Позже на его основе были созданы серийные образцы РЛС: Seetakt для военно-морских сил и Freya для ПВО. В 1940 году в немецкую армию стала поступать система радиолокационная управления огнем Würzburg.
Однако, несмотря на очевидные достижения германских ученых и инженеров в области радиолокации, немецкая армия начала использовать радиолокаторы позже англичан. Гитлер и верхушка Рейха считали радары исключительно оборонительным оружием, которое не слишком нужно победоносной немецкой армии. Именно по этой причине к началу битвы за Британию у немцев было развернуто только восемь радиолокационных станции Freya, хотя по своим характеристикам они, как минимум, не уступали английским аналогам. В целом же, можно сказать, что именно успешное использование радаров во многом определило исход битвы за Британию и все последующее противостояние между германской авиацией и ВВС союзников в небе Европы.
Позже немцы на основе системы Würzburg создали рубеж ПВО, который получил название «линии Каммхубера». Используя подразделения специального назначения, союзники сумели разгадать секреты работы немецких радаров, что позволило эффективно глушить их.

Несмотря на то что англичане вступили в «радарную» гонку позже американцев и немцев на финише они сумели обогнать их и подойти к началу Второй мировой войны с самой продвинутой системой радиолокационного обнаружения самолетов.
Уже в сентябре 1935 года англичане приступили к постройке сети радиолокационных станций, в состав которой перед войной уже входило двадцать РЛС. Она полностью перекрывала подлет к Британским островам со стороны европейского побережья. Летом 1940 года британскими инженерами был создан резонансный магнетрон, позже ставший основой бортовых радиолокационных станций, устанавливаемых на американских и британских самолетах.
Работы в области военной радиолокации велись и в Советском Союзе. Первые успешные эксперименты по обнаружению самолетов с помощью радиолокационных станций в СССР были проведены еще в середине 30-х годов. В 1939 году на вооружение РККА была принята первая РЛС РУС-1, а в 1940 году – РУС-2. Обе эти станции были запущены в серийное производство.
Вторая мировая война наглядно показала высокую эффективность использования радиолокационных станций. Поэтому после ее окончания разработка новых РЛС стала одним из приоритетных направлений развития военной техники. Бортовые радиолокаторы получили все без исключения военные самолеты и корабли, РЛС стали основой для систем противовоздушной обороны.
В период Холодной войны у США и СССР появилось новое разрушительное оружие – межконтинентальные баллистические ракеты. Обнаружение запуска этих ракет стало вопросом жизни или смерти. Советский ученый Николай Кабанов предложил идею использования коротких радиоволн для обнаружения самолетов противника на больших расстояниях (до 3 тыс. км). Она была довольно проста: Кабанов обнаружил, что радиоволны длиной 10-100 метров способны отражаться от ионосферы и, облучая цели на поверхности земли, возвращаться тем же путем к РЛС.

Позже на основе этой идеи были разработаны радиолокаторы загоризонтного обнаружения запуска баллистических ракет. Примером таких РЛС может служить «Дарьял» — радиолокационная станция, которая несколько десятилетий была основой советской системы предупреждения о ракетных пусках.
В настоящее время одним из самых перспективных направлений развития радиолокационной техники считается создание РЛС с фазированной антенной решеткой (ФАР). Подобные радары имеют не один, а сотни излучателей радиоволн, работой которых руководит мощный компьютер. Радиоволны, испускаемые разными источниками в ФАР, могут усиливать друг друга, если они совпадают по фазе, или же, наоборот, ослаблять.
Сигналу РЛС с фазированной решеткой можно придавать любую необходимую форму, его можно перемещать в пространстве без изменения положения самой антенны, работать с разными частотами излучения. РЛС с фазированной решеткой гораздо надежней и чувствительней, чем радиолокатор с обычной антенной. Однако у подобных радаров есть и недостатки: большой проблемой является охлаждение РЛС с ФАР, кроме того, они сложны в производстве и дорого стоят.

Новые радиолокационные станции с фазированной решеткой устанавливаются на истребители пятого поколения. Эта технология используется в американской системе раннего предупреждения о ракетном нападении. Радиолокационный комплекс с ФАР будет установлен на новейший российский танк «Армата». Следует отметить, что Россия является одним из мировых лидеров в разработке радиолокаторов с ФАР.
militaryarms.ru
Радиолокационные станции — это… Что такое Радиолокационные станции?
Радиолокационная станция (РЛС) или рада́р (англ. radar от Radio Detection and Ranging — радиообнаружение и дальнометрия) — система для обнаружения воздушных, морских и наземных объектов, а также для определения их дальности и геометрических параметров. Использует метод, основанный на излучении радиоволн и регистрации их отражений от объектов. Английский термин-акроним появился в 1941 г., впоследствии в его написании прописные буквы были заменены строчными.
История
В 1887 году немецкий физик Генрих Герц начал эксперименты, в ходе которых он открыл существование электромагнитных волн, предсказанных теорией Джеймса Максвелла. Герц научился генерировать и улавливать электромагнитные радиоволны и обнаружил, что они по-разному поглощаются и отражаются различными материалами.
Одно из первых устройств, предназначенных для радиолокации воздушных объектов продемонстрировал 26 февраля 1935 г. шотландский физик Роберт Ватсон-Ватт, который примерно за год до этого получил первый патент на изобретение подобной системы.
Россия
В Советском Союзе осознание необходимости средств обнаружения авиации, свободных от недостатков звукового и оптического наблюдения, привела к разворачиванию исследований в области радиолокации. Идея, предложенная молодым артиллеристом Павлом Ощепковым получила одобрение высшего командования: наркома обороны СССР К. Е. Ворошилова и его заместителя — М. Н. Тухачевского.
3 января 1934 года в СССР был успешно проведён эксперимент по обнаружению самолёта радиолокационным методом. Самолёт, летящий на высоте 150 метров был обнаружен на дальности 600 метров от радарной установки. Эксперимент был организован представителями Ленинградского Института Электротехники и Центральной Радиолаборатории. В 1934 году маршал Тухачевский в письме правительству СССР написал: «Опыты по обнаружению самолётов с помощью электромагнитного луча подтвердили правильность положенного в основу принципа». Первая опытная установка «Рапид» была опробована в том же же году[1][2], в 1936 году советская сантиметровая радиолокационная станция «Буря» засекала самолёт с расстояния 10 километров[1][3]. В США первый контракт военных с промышленностью был заключён в 1939 году. В 1946 году американские специалисты — Реймонд и Хачертон, бывший сотрудник посольства США в Москве, написали: «Советские учёные успешно разработали теорию радара за несколько лет до того, как радар был изобретён в Англии».[4]
Классификация радаров
По предназначению радиолокационные станции можно классифицировать следующим образом:
- РЛС обнаружения;
- РЛС управления и слежения;
- Панорамные РЛС;
- РЛС бокового обзора;
- Метеорологические РЛС.
По сфере применения различают военные и гражданские РЛС.
По характеру носителя:
- Наземные РЛС
- Морские РЛС
- Бортовые РЛС
По типу действия
- Первичные или пассивные
- Вторичные или активные
- Совмещённые
По диапазону волн:
- Метровые
- Сантиметровые
- Миллиметровые
Устройство и принцип действия Первичного радиолокатора
Первичный (пассивный) радиолокатор, в основном, служит для обнаружения целей, освещая их электромагнитной волной и затем принимая отражения (эхо) этой волны от цели. Поскольку скорость электромагнитных волн постоянна (скорость света), становится возможным определить расстояние до цели, основываясь на измерении времени распространения сигнала.
В основе устройства радиолокационной станции лежат три компонента: передатчик, антенна и приёмник.
Передающее устройство является источником электромагнитного сигнала высокой мощности. Он может представлять из себя мощный импульсный генератор. Для импульсных РЛС сантиметрового диапазона — обычно магнетрон или импульсный генератор работающий по схеме: задающий генератор — мощный усилитель, использующий в качестве генератора чаще всего лампу бегущей волны, а для РЛС метрового диапазона, часто используют — триодную лампу. В зависимости от конструкции, передатчик работает либо в импульсном режиме, формируя повторяющиеся короткие мощные электромагнитные импульсы, либо излучает непрерывный электромагнитный сигнал.
Антенна выполняет фокусировку сигнала приёмника и формирование диаграммы направленности, а также приём отражённого от цели сигнала и передачу этого сигнала в приёмник. В зависимости от реализации приём отражённого сигнала может осуществляться либо той же самой антенной, либо другой, которая иногда может располагаться на значительном расстоянии от передающего устройства. В случае, если передача и приём совмещены в одной антенне, эти два действия выполняются поочерёдно, а чтобы мощный сигнал, просачивающийся от передающего передатчика в приёмник не ослепил приёмник слабого эха, перед приёмником размещают специальное устройство, закрывающее вход приёмника в момент излучения зондирующего сигнала.
Приёмное устройство выполняет усиление и обработку принятого сигнала. В самом простом случае результирующий сигнал подаётся на лучевую трубку (экран), которая показывает изображение, синхронизированное с движением антенны.
Когерентные РЛС
Когерентный метод радиолокации основан на выделении и анализе разности фаз отправленного и отражённого сигналов, которая возникает из-за эффекта Доплера, когда сигнал отражается от движущегося объекта. При этом передающее устройство может работать как непрерывно, так и в импульсном режиме. Основным преимуществом данного метода является то, что он «позволяет наблюдать только движущиеся объекты, а это исключает помехи от неподвижных предметов, расположенных между приёмной аппаратурой и целью или за ней.»[5]
Импульсные РЛС
Принцип действия импульсного радара
Принцип определения расстояния до объекта с помощью импульсного радара
Современные радары сопровождения построены как импульсные радары. Импульсный радар передаёт только в течение очень краткого времени, короткий импульс обычно приблизительно микросекунда в продолжительности, после чего он слушает эхо, в то время как импульс распространяется.
Поскольку импульс уходит далеко от радара с постоянной скоростью, время прошедшее с момента, когда импульс посылали, ко времени когда эхо получено, — ясная мера прямого расстояния до цели. Следующий импульс можно послать только через некоторое время, а именно после того как импульс придёт обратно, это зависит от дальности обнаружения радара (данным мощностью передатчика, усилением антенны и чувствительностью приёмника). Если бы импульс посылали раньше, то эхо предыдущего импульса от отдалённой цели могло бы быть перепутано с эхом второго импульса от близкой цели.
Промежуток времени между импульсами называют интервалом повторения импульса, обратная к нему величина — важный параметр, который называют частотой повторения импульса (ЧПИ) . Радары низкой частоты дальнего обзора, обычно имеют интервал повторения в несколько сотен импульсов в секунду (или Герц [Гц]). Частота повторения импульсов является одним из отличительных признаков, по которым возможно дистанционное определение модели РЛС.
Устранение пассивных помех
Одной из основных проблем импульсных РЛС является избавление от сигнала, отражающегося от неподвижных объектов: земной поверхности, высоких холмов и т. п. Если к примеру, самолёт находится на фоне высокого холма, отражённый сигнал от этого холма полностью перекроет сигнал от самолёта. Для наземных РЛС эта проблема проявляется при работе с низколетящими объектами. Для бортовых импульсных РЛС она выражается в том, что отражение от земной поверхности затеняет все объекты, лежащие ниже самолёта с радиолокатором.
Методы устранения помех используют, так или иначе, эффект Доплера (частота волны, отражённой от приближающегося объекта, увеличивается, от уходящего объекта — уменьшается).
Самый простой радар, который может обнаружить цель в помехах — радар с селекцией движущихся целей (СДЦ) — импульсный радар, который сравнивает отражения более чем от двух или больше интервалов повторения импульса. Любая цель, которая, движется относительно радара, производит изменение в параметре сигнала (стадия в последовательном СДЦ), тогда как помехи остаются неизменными. Устранение помех происходит путём вычитания отражений из двух последовательных интервалов. На практике устранение помех может быть осуществлено в специальных устройствах — черезпериодных компенсаторах или алгоритмами в программном обеспечении.
СДЦ, работающие с постоянной частотой повторения импульсов, имеют фундаментальную слабость: они являются слепыми к целям со специфическими круговыми скоростями (которые производят изменения фаз точно в 360 градусов), и такие цели не отображаются. Скорость, при которой цель исчезает для радиолокатора, зависит от рабочей частоты станции и от частоты повторения импульсов. Современные СДЦ излучают несколько импульсов с различной частоты повторения — такой, что невидимые скорости в каждой частоте повторения импульсов охвачены другими ЧПИ.
Другой способ избавления от помех реализован в импульсно-доплеровских РЛС, которые используют существенно более сложную обработку чем РЛС с СДЦ.
Важное свойство импульсно-доплеровских РЛС — это когерентность сигнала. Это значит, что посланные сигналы и отражения должны иметь определённую фазовую зависимость.
Импульсно-доплеровские РЛС обычно считаются лучше РЛС с СДЦ при обнаружении низколетящих целей во множественных помехах земли, это — предпочтительная техника, используемая в современном истребителе, для воздушного перехвата/управления огнём, примеры тому AN/APG-63, 65, 66, 67 и 70 радары. В современном доплеровском радаре большинство обработки выполняется отдельным процессором в цифровом виде с помощью цифровых сигнальных процессоров, обычно используя высокопроизводительный алгоритм Быстрое преобразование Фурье для преобразования цифровых данных образцов отражений кое во что более управляемое другими алгоритмами. Цифровые обработчики сигналов очень гибки и используемые алгоритмы могут обычно быстро заменяться другими, заменяя только память (ПЗУ) чипы, таким образом быстро противодействуя техники глушения противника если необходимо.
Устройство и принцип действия Вторичного радиолокатора
Принцип действия вторичного радиолокатора несколько отличается, от принципа Первичной радиолокации. В основе устройства Вторичной радиолокационной станции лежат компоненты: передатчик, антенна, генераторы азимутальных меток, приёмник, сигнальный процессор, индикатор и самолётный ответчик с антенной.
Передатчик. Служит для излучения импульсов запроса в антенну на частоте 1030 МГц
Антенна. Служит для излучения и приёма отражённого сигнала. По стандартам ICAO для вторичной радиолокации, антенна излучает на частоте 1030МГц, и принимает на частоте 1090 МГц.
Генераторы Азимутальных меток. Служат для генерации Азимутальных меток (Azimuth Change Pulse или ACP) и генерации Метки Севера (Azimuth Reference Pulse или ARP). За один оборот антенны РЛС генерируется 4096 малых азимутальных меток(для старых систем), или 16384 Малых азимутальных меток (для новых систем), их ещё называет улучшенные малые азимутальные метки (Improved Azimuth Change pulse или IACP), а также одну метку Севера. Метка севера приходит с генератора азимутальных меток, при таком положении антенны, когда она направлена на Север, а малые азимутальные метки служат для отсчёта угла разворота антенны.
Приёмник. Служит для приёма импульсов на частоте 1090 МГц
Сигнальный процессор. Служит для обработки принятых сигналов
Индикатор Служит для индикации обработанной информации
Самолётный ответчик с антенной Служит для передачи импульсного радиосигнала, содержащего дополнительную информацию, обратно в сторону РЛС при получении радиосигнала запроса.
Принцип Действия Принцип действия вторичного радиолокатора заключается в использовании энергии самолётного ответчика, для определения положения Воздушного судна. РЛС облучает окружающее пространства запросными импульсами на частоте P1 и P3, а также импульсом подавления P2 на частоте 1030 МГц. Воздушные суда оборудованные ответчиками находящиеся в зоне действия луча запроса при получении запросных импульсов, если действует условие P1,P3>P2 отвечают запросившей РЛС, Серией кодированных импульсов на частоте 1090 МГц, в которых содержится дополнительная информация типа Номер борта, Высота и так далее. Ответ самолётного ответчика зависит от режима запроса РЛС, а режим запроса определяется растоянием между запросными импульсами P1 и P3 например в режиме запроса А (mode A), расстояние между запросными импульсами станции P1 и P3 равно 8 микросекунд, и при получении такого запроса ответчик воздушного судна кодирует в импульсах ответа свой номер борта. В режиме запроса C (mode C) расстояние между запросными импульсами станции равно 21 микросекунде и при получении такого запроса ответчик воздушного судна кодирует в импульсах ответа свою высоту. Также РЛС может посылать запрос в смешанном режиме, например Режим А, Режим С, Режим А, Режим С. Азимут Воздушного судна определяется, углом поворота антенны, который в свою очередь определяется путём подсчёта Малых Азимутальных меток. Дальность определяется, по задержке пришедшего ответа Если Воздушное судно не лежит в зоне действия основного луча, а лежит в зоне действия боковых лепестков, или находится сзади антенны, то ответчик Воздушного судна при получении запроса от РЛС, получит на своём входе условие, что импульсы P1,P3<P2, то есть импульс подавления больше импульсов запроса. Учитываю этот фактор ответчик запирается и не отвечает на запрос. Принятый от ответчика сигнал принимается и обрабатывается приёмником РЛС, затем поступает на сигнальный процессор, который проводит обработку сигналов, и выдачу информации конечному потребителю, и или на контрольный индикатор.
Плюсы вторичной РЛС, более высокая точность, дополнительная информация о Воздушном Судне (Номер борта, Высота), а также малое по сравнению с Первичными РЛС излучение.
См. также
Другие страницы
Литература и сноски
- ↑ 1 2 Поляков В. Т. «Посвящение в радиоэлектронику», М., РиС, ISBN 5-256-00077-2
- ↑ передатчик был установлен на крыше дома 14 по Красноказарменной улице, Москва, приёмник — в районе посёлка Новогиреево; присутствовали М. Н. Тухачевский, Н.Н.Нагорный, М. В. Шулейкин. Аппаратуру демонстрировал П. К. Ощепков.
- ↑ Испытания в Евпатории, группа Б. К. Шембеля
- ↑ http://www.young-science.ru/index.php?option=com_content&task=view&id=215&Itemid=66
- ↑ Шембель Б. К. У истоков радиолокации в СССР. — Советское радио, 1977, № 5, с. 15-17.
Wikimedia Foundation. 2010.
dal.academic.ru
Радиолокационная Станция что это? Значение слова Радиолокационная Станция
Радиолокационная Станция в Энциклопедическом словаре:
Радиолокационная Станция — (радиолокатор — радар), устройство для наблюденияза различными объектами (целями) методами радиолокации. Основные элементы:антенная система, передатчик (в пассивных радиолокационных станциях егонет), приемник со световым индикатором и (в современных радиолокационныхстанциях) с ЭВМ для обработки сигналов. Различают радиолокационныестанции: наземные, морские, самолетные, спутниковые и т. д.. импульсные ис непрерывным излучением. различных диапазонов радиоволн (длина от мм дом). по конкретному назначению (напр., радиолокационные станции системуправления воздушным движением, СОН — станция орудийной наводки) и т. д.
Определение «Радиолокационная Станция» по БСЭ:
Радиолокационная станция (РЛС)
радиолокатор, радар, устройство для наблюдения за различными объектами (целями) методами радиолокации. Основные узлы РЛС — передающее и приёмное устройства, расположенные в одном пункте (т. н. совмещенная РЛС) или в пунктах, удалённых друг от друга на некоторое (обычно значительное) расстояние (двух- и многопозиционные РЛС). в РЛС, применяемых для пассивной радиолокации, передатчик отсутствует. Антенна может быть общей для передатчика и приёмника (у совмещенной РЛС) или могут применяться раздельные антенны (у многопозиционных РЛС). Важная составная часть приёмного устройства РЛС (после собственно приёмника) — световой индикатор на электроннолучевой трубке (ЭЛТ), а в современных (середины 70-х гг.) РЛС наряду с индикатором — ЦВМ, автоматизирующая многие операции по обработке принятых сигналов. Основные характеристики РЛС: точность измерений, разрешающая способность, предельные значения ряда параметров (максимальная и минимальная дальность действия, сектор и время обзора и др.), помехоустойчивость. К основным характеристикам относят также мобильность РЛС, её массу, габариты, мощность электропитания, срок службы, количество обслуживающего персонала и многие др. эксплуатационные параметры.
Появление и развитие РЛС. Первые РЛС были станциями обнаружения самолётов. 5 стационарных импульсных РЛС было установлено на юго-западном побережье Великобритании в 1936. Они работали на сравнительно длинных (метровых) волнах, были весьма громоздки и не могли обнаруживать самолёты, летевшие на малой высоте. Тем не менее вскоре цепочка таких станций была установлена вдоль всего английского побережья Ла-Манша. она показала свою эффективность при отражении налётов немецкой авиации во время 2-й мировой войны 1939-45. В США опытная импульсная РЛС была установлена на корабле и прошла всесторонние испытания в 1937. После этого работы по созданию РЛС различного назначения получили в США бурное развитие, и к началу 40-х гг. были созданы РЛС сантиметрового диапазона волн для обнаружения самолетов, летящих на большом удалении.
В СССР первые опыты по радиообнаружению самолётов были проведены в 1934. Промышленный выпуск первых РЛС, принятых на вооружение, был начат в 1939. Эти станции (РУС-1) с непрерывным излучением, модулированным звуковой частотой, располагались цепочкой вдоль некоторой линии и позволяли обнаруживать самолёт, пересекающий эту линию. Они были применены на Карельском перешейке во время советско-финляндской войны 1939-40 и на Кавказе во время Великой Отечественной войны 1941-45. Первая импульсная радиолокационная установка была испытана в 1937. Промышленный выпуск импульсных РЛС (РУС-2, «Редут»)
начался в 1940. Эти станции имели одну приёмо-передающую антенну и помещались вместе с источником электропитания в кузове автомашины. Они позволяли обнаруживать самолёты при круговом обзоре воздушного пространства на расстояниях (в зависимости от высоты полёта) до 150 км. В 1940 Ленинградским физико-техническим институтом (руководитель работ Ю. Б. Кобзарев) было закончено сооружение стационарной РЛС для системы ПВО. Антенны станции располагались на большой высоте (20 м), что обеспечивало большую дальность обнаружения (&sim. 250 км) и давало возможность обнаруживать сравнительно низко летящие самолёты. Во время Великой Отечественной войны, кроме станций
«Редут», было развёрнуто производство надёжных портативных станций «Пегматит», которые можно было легко перевозить в упакованном виде и быстро устанавливать в любом помещении. Впоследствии станции «Пегматит» были усовершенствованы так, что они позволили определять, кроме дальности и азимута самолёта, его высоту. В конце войны совершенствование РЛС происходило в направлении как повышения дальности их действия и точности измерений, так и автоматизации отдельных операций посредством автоматических следящих систем для измерения дальности и слежения по угловым координатам (в станциях орудийной наводки), автоматических счётных устройств (в станциях для «слепого» бомбометания)
и т.д.
После 2-й мировой войны, с развитием авиации (повышением высоты, скорости полёта и манёвренности самолётов), появилась необходимость создания РЛС, способных работать в условиях сложной обстановки — при большом количестве объектов и действии умышленных помех. Повышение точности измерения координат (в т. ч. благодаря новым методам их измерения), сопряжение РЛС с вычислительными машинами и общей системой радиоуправления снарядами-ракетами существенно изменили технические и тактические параметры РЛС, ставших важнейшим звеном автоматизированной системы управления средствами ПВО.
Появление в 50-60-х гг. ракетной и космической техники привело к созданию РЛС для решения ряда новых задач (см. в ст. Радиолокация). Были разработаны разнообразные РЛС для решения многих задач науки и народного хозяйства (см., например, Радионавигационная система, Метеорный радиолокатор, Планетный радиолокатор, Радиолокационная астрономия, Радиолокация в метеорологии и т.д.).
Основные типы РЛС. РЛС различают прежде всего по конкретным задачам, выполняемым ими автономно или в комплексе средств, с которыми они взаимодействуют, например: РЛС систем управления воздушным движением, РЛС обнаружения или наведения зенитных управляемых ракет систем ПВО, РЛС для поиска космических летательных аппаратов (КЛА) и сближения с ними, самолётные РЛС кругового или бокового обзора и т.д. Специфика решения отдельных задач и их широкий спектр привели к большому разнообразию типов РЛС. Например, для повышения точности стрельбы по самолётам в головках зенитных снарядов устанавливают миниатюрные РЛС, измеряющие расстояние от снаряда до объекта и приводящие в действие (на определённом расстоянии) взрыватель снаряда. для своевременного предупреждения самолёта о приближении со стороны его
«хвоста» др. самолёта на нём устанавливают РЛС «защиты хвоста», автоматически вырабатывающую предупредительный сигнал.
В зависимости от места установки РЛС различают наземные, морские, самолётные, спутниковые РЛС и т.д. РЛС подразделяют также по техническим характеристикам: по несущей частоте (рабочему диапазону длин волн) — на РЛС метрового, дециметрового (ДМ), сантиметрового (СМ), миллиметрового (ММ) и др. диапазонов. по методам и режимам работы — на РЛС импульсные и с непрерывным излучением, когерентные и с некогерентным режимом работы и т.д.. по параметрам важнейших узлов РЛС — передатчика, приёмника, антенны и системы обработки принятых сигналов, а также по др. техническим и тактическим параметрам РЛС.
РЛС точного измерения координат, называются станциями орудийной наводки (СОН), определяют с высокой степенью точности координаты (азимут, угол места, дальность) воздушных, морских и наземных объектов (рис. 1). Для зенитной артиллерии появление этих станций означало техническую революцию. Резкое повышение точности измерения координат, в первую очередь угловых, стало возможным после освоения СМ диапазона волн, позволившего формировать в СОНах посредством антенн высоконаправленное излучение радиоволн. При этом резко повысилось использование излучаемой мощности в нужных направлениях и удалось в значительной мере избавиться от влияния Земли, местных предметов и ряда др. помех работе РЛС.
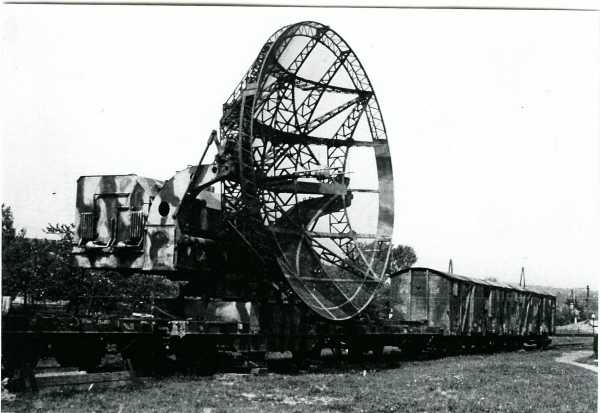
Использование СМ диапазона позволило создать панорамные самолётные РЛС кругового обзора земной поверхности (рис. 2), сыгравшие важную роль во время 2-й мировой войны при решении задачи «слепого» бомбометания, а также при поиске и уничтожении на море подводных лодок. Для этих станций характерна высокая степень различения отдельных деталей на земной поверхности (мостов, сооружений, железных дорог и т.д.) или на море (перископов подводных лодок и т.п.).
Освоение СМ диапазона привело также к созданию РЛС обнаружения самолетов и наведения на них самолётов-перехватчиков, которые, используя данные, полученные от РЛС дальнего обнаружения, или работая автономно, обнаруживают самолёты и одновременно измеряют их координаты — дальность, азимут и высоту полёта (например, т. н. методом V-луча). Для реализации этого метода применяют 2 антенны, одна из которых имеет диаграмму направленности, узкую по азимуту и широкую в вертикальной плоскости, а другая — диаграмму направленности такой же формы, но отклоненную от вертикальной плоскости на угол, равный 45° (рис. 3). При совместном вращении обеих антенн азимут и дальность объекта определяются посредством первой антенны, а высота — по промежутку времени, через который объект фиксируется второй антенной.
РЛС бокового обзора, предназначенные для картографирования земной поверхности, решения задач воздушной разведки и т.д., имеют высокую разрешающую способность, определяющую качество радиолокационного изображения, его детальность. Это достигается либо значительным увеличением размера антенны, располагаемой вдоль фюзеляжа самолёта, что позволяет увеличить разрешающую способность по сравнению с панорамными РЛС кругового обзора на порядок, либо применением метода искусственного раскрыва антенны (рис. 4), позволяющего приблизиться к разрешающей способности оптических средств наблюдения (рис. 5). при этом разрешающая способность не зависит от дальности наблюдения и длины волны зондирующего сигнала. В РЛС с искусственным раскрывом антенны часто используют сложные оптические системы многоканальной (по дальности) обработки сигналов с когерентным накоплением их в каждом канале. Сопряжение таких систем с фотографическими устройствами позволяет получать высококачественную запись информации.
РЛС систем ПРО крупных городов и промышленных объектов (в США, по данным иностранной печати) образуют радиолокационный комплекс, включающий РЛС обнаружения, сопровождения и опознавания целей и РЛС наведения противоракет, работающие главным образом в СМ, реже в ДМ диапазонах волн (рис. 6). Такая многофункциональная РЛС содержит несколько сотен передатчиков с импульсной мощностью каждого от 0,1 до 1 вт, фазированную антенную решётку, работой которой управляет ЦВМ, несколько тыс. параметрических усилителей, установленных во входных цепях приёмников. За рубежом существуют проекты наземных систем ПРО на основе применения мощных Лазеров, предназначенных для поражения целей. Такие системы должны работать совместно со средствами автоматического слежения и фокусировки лазерного луча высокой интенсивности, в том числе с РЛС грубого слежения, обеспечивающей получение ориентировочных данных о приближающейся цели, с РЛС на лазерах для точного слежения за целью (см. Оптическая локация) и с системой распознавания истинной цели при наличии ложных целей. Благодаря возможности получения узкого луча и малым габаритам РЛС на лазерах их предполагается применять также на КЛА и спутниках.
РЛС слежения за искусственными спутниками 3емли (ИСЗ) и измерения их траекторий различают прежде всего по составу и количеству измеряемых параметров. В простейшей однопараметрической РЛС ограничиваются измерением только доплеровской частоты (см. Доплера эффект), по характеру изменения которой в месте расположения РЛС определяют период обращения ИСЗ и др. параметры его орбиты. Орбиту ИСЗ можно точно определить, применив на трассе полёта ИСЗ несколько РЛС СМ диапазона, например точных импульсных РЛС — Радиодальномеров, работающих с ответчиком на борту ИСЗ, у которого нестабильность задержки ответного импульса относительно мала. Эти РЛС с параболическими антеннами обеспечивают в режиме слежения определение угловых координат ИСЗ с точностью порядка нескольких угловых минут при коническом сканировании и порядка 1 угловой минуты при моноимпульсном методе.
Т. о., эти трёхпараметрические РЛС являются некоторым развитием СОН, отличаясь от них построением основного канала автодальномера, многошкальностью и сохранением высокой точности слежения по дальности (ошибка измерения при космических скоростях объекта порядка 10 м). Импульсный режим позволяет реализовать одновременную работу нескольких РЛС с одним ответчиком. Применяют и четырёхпараметрические РЛС с когерентным ответчиком на борту, в которых дополнительное измерение радиальной скорости космических объектов обеспечивается при более простом режиме непрерывных колебаний. Сохранение импульсного режима и измерение радиальной скорости по частоте Доплера требует применения в РЛС импульсного когерентного режима, при котором вместо простого магнетронного передатчика применяется СВЧ усилитель мощности (например, на клистроне) и более сложный импульсный когерентный ответчик. Станции, измеряющие 6 параметров движения объекта — дальность, 2 угловые координаты и 3 их производные (т. е. радиальную и 2 угловые скорости), — применяют, например, при измерениях этих параметров, осуществляемых из одного пункта на активном участке полёта ракеты или КЛА. Сложность таких РЛС связана с построением многих каналов точного фазового измерения угловых координат (точность &sim. 10 угловых секунд).
Другое направление использования РЛС для слежения за ИСЗ с высотой полёта в несколько сотен км и измерения их траектории основано на применении точных пеленгаторов ДМ диапазона со значительно более простыми (неследящими) антеннами фазовых угломерных каналов, обладающими в этом диапазоне достаточной эффективной площадью, а также экономичных и простых бортовых передатчиков, работающих в режиме непрерывных колебаний.
Для слежения за ИСЗ на расстояниях &sim.40 тыс.км (стационарные ИСЗ или ИСЗ с эллиптической орбитой типа «Молния») применяют РЛС со следящими (по программе полёта — в ДМ диапазоне и автоматически — в СМ диапазоне) полноповоротными параболическими антеннами.
Планетная РЛС, измеряющая расстояние до планеты, параметры её движения и др. физические характеристики, отличается большой эффективной поверхностью антенны, большой мощностью передатчика и высокой чувствительностью приёмного устройства. Длительность зондирующего сигнала таких РЛС ограничена временем прохождения радиоволн от Земли до планеты и обратно, которое равно, например, для Венеры &sim.5 мин, для Марса &sim. 10 мин и для Юпитера &sim. 1 ч. Так, в планетной РЛС, посредством которой сотрудники института радиотехники и электроники АН СССР изучали Марс, дальномерные измерения проводились фазовым методом по огибающей колебаний с несущей частотой 768 Мгц, модулированных по амплитуде колебаниями с частотами 3 и 4 гц, а измерения радиальной составляющей скорости — доплеровским методом на несущей частоте. Принимаемый сигнал во время сеансов наблюдения запоминался (записывался магнитофоном), а задержка огибающей принятого сигнала определялась (в процессе его многократного воспроизведения за пределами сеанса связи) корреляционным методом — по максимуму выходного сигнала Коррелометра при различных задержках опорного сигнала. Величина доплеровского смещения частоты определялась при помощи селективных электрических фильтров, настроенных на определённые резонансные частоты.
3агоризонтные РЛС, используемые (в США, по данным иностранной печати) в декаметровом (коротковолновом) диапазоне волн для наблюдения на расстояниях в несколько тысяч км (например, с целью раннего обнаружения пусков баллистических ракет и грубого определения их координат, обнаружения ядерных взрывов, наблюдения за различными областями ионосферы, за полётом ИСЗ и т.д.), представляют собой наземные стационарные установки со сложными большими антеннами типа многоэлементных антенных решёток и мощными передатчиками с импульсной мощностью несколько десятков Мвт. Как правило, такие РЛС двух- или многопозиционные. Для них характерны многоканальное построение (например, со 120 и более каналами в диапазоне частот 4-6 Мгц), возможность устанавливать различные длительности импульсных сигналов и частоту их повторения и соответственно регулировать ширину полосы частот в приёмнике и др. характеристики, находя оптимальный режим в зависимости от состояния ионосферы и характера поставленной задачи.
Лит.: Бартон Д., Радиолокационные системы, пер. с англ., М., 1967. Леонов А. И., Радиолокация в противоракетной обороне, М., 1967. Радиолокационные станции бокового обзора, под ред. А. П. Реутова, М., 1970. Мищенко Ю. А., Загоризонтная радиолокация, М., 1972.
А. Ф. Богомолов.
Рис. 5. Радиолокационное изображение горной прибрежной местности.
Рис. 1. Радиолокационная станция орудийной наводки.
Рис. 2. Схема кругового обзора земной поверхности с помощью самолётной РЛС.
Рис. 3. Наземная РЛС обнаружения и наведения самолётов.
Рис. 4. Схема бокового обзора местности с помощью самолётной РЛС.
Рис. 5. Схематическое изображение лучей многофункциональной РЛС системы противоракетной обороны.
Расскажите вашим друзьям что такое — Радиолокационная Станция. Поделитесь этим на своей странице.
xn—-7sbbh7akdldfh0ai3n.xn--p1ai
Слово РЛС — Что такое РЛС?
Слово рлс английскими буквами(транслитом) — rls
Слово рлс состоит из 3 букв: л р с
Значения слова рлс. Что такое рлс?
Авиационные РЛС
Бортовая авиационная радиолокационная станция (БРЛС) — система бортового радиоэлектронного оборудования (БРЭО), предназначенная для обнаружения воздушных, морских и наземных объектов методом радиолокации, а также для определения их дальности…Бортовая авиационная радиолокационная станция (БРЛС) — система бортового радиоэлектронного оборудования (БРЭО…
ru.wikipedia.org
Габалинская РЛС
Габалинская радиолокационная станция — радиолокационная станция типа «Дарьял», составная часть российской системы предупреждения о ракетном нападении, находится неподалёку от города Габала в Азербайджане, одна из девяти станций данного типа…Габалинская радиолокационная станция Назначение предупреждения о ракетном нападении Государственная принадлежность…
ru.wikipedia.org
Русский язык
РЛС [эрэлэ́с], нескл., ж. (сокр.: радиолокационная станция).
Орфографический словарь. — 2004
Примеры употребления слова рлс
В логическую цепочку, как отмечают авторы, вписываются уход российской РЛС из Габалы, сокращение закупок газа у Азербайджана, прекращение транспортировки нефти, приобретение Азербайджаном израильских вооружений вместо российских.
Договор по аренде Габалинской РЛС не был продлен Азербайджаном, а Россия расторгла договор по прокачке азербайджанской нефти по новороссийскому нефтепроводу.
Так, ранее Баку и Москва не договорились по условиям эксплуатации Габалинской РЛС.
Также Баку не отступило во время переговоров по аренде Габалинский РЛС.
Формальным поводом для действий Москвы по прекращению транзита азербайджанской нефти по своей территории, как и в случае с прекращением договора о РЛС Габала, стал ценовой вопрос.
- ришта
- риял
- ркацители
- рлс
- рнк
- роба
- роббер
wordhelp.ru
РАДИОЛОКАЦИОННАЯ СТАНЦИЯ — это… Что такое РАДИОЛОКАЦИОННАЯ СТАНЦИЯ?
- РАДИОЛОКАЦИОННАЯ СТАНЦИЯ
- РАДИОЛОКАЦИОННАЯ СТАНЦИЯ. (РЛС, радар, радиолокатор), радиоэлектронная система для определения направления движения и дальности объектов. Первые разработки РЛС были сделаны британскими и немецкими учеными во время Второй мировой войны. РЛС работает следующим образом: передатчик распространяет импульсы РАДИОВОЛН по направлению к объекту, который отражает эти импульсы, а АНТЕННА улавливает отраженные сигналы. Расстояние до объекта вычисляется путем измерения интервала времени, за который возвращаются отраженные сигналы, а направление движения объекта устанавливается по юстировке принимающей антенны РЛС. Служба управления воздушным движением использует РЛС для определения координат летающих объектов. В этом случае вращающаяся антенна посылает сигналы и принимает отраженные волны, которые выводятся на дисплей с круглым экраном, так называемый индикатор кругового обзора, в виде светящихся движущихся точек. В 1946 г. радиолокационные лучи, посланные с Земли, были отражены поверхностью Луны, положив начало радиоастрономии. см. также ДОПЛЕРОВСКИЙ ЭФФЕКТ, ДОПЛЕРОВСКИЙ РАДАР.
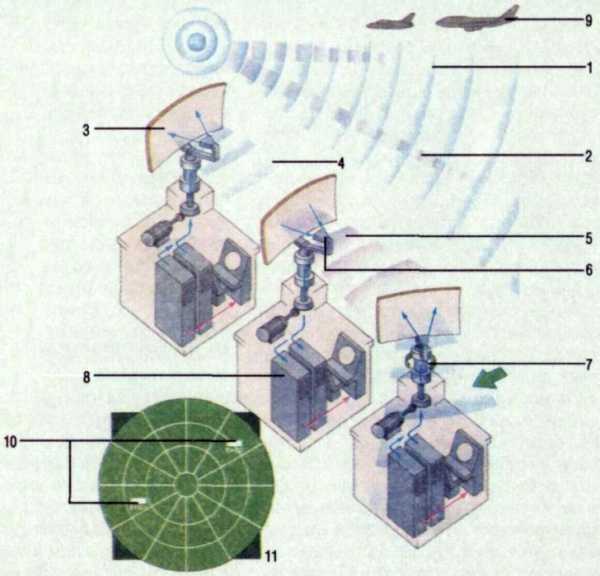
Радиолокационная система определяет местоположение летающих объектов, посылая сигнал (1) и принимая любой отраженный сигнал (2). Параболическая радиолокационная антенна (3) отражает выходящий сигнал (4) и фокусирует отраженный сигнал (эхо-сигнал) (5) на приемное устройство (6). Радиолокационная антенная решетка (7) вращается на 360°. Компьютер (8) обрабатывает полученный сигнал и самолеты (9) в пределах досягаемости высвечиваются отметками (10) на экране оператора (11).
Научно-технический энциклопедический словарь.
- РАДИОЛОКАЦИОННАЯ АСТРОНОМИЯ
- РАДИОМАЯК
Смотреть что такое «РАДИОЛОКАЦИОННАЯ СТАНЦИЯ» в других словарях:
Радиолокационная станция П-8 — П 8 («Волга») советская наземная радиолокационная станция дальнего обнаружения, работавшая в метровом диапазоне волн. Первая советская РЛС кругового обзора. По сравнению с существующими советскими станциями (РУС 2, РУС 2с и П 3), новая станция… … Википедия
Радиолокационная станция П-10 — П 10 («Волга А») советская наземная радиолокационная станция дальнего обнаружения, работавшая в метровом диапазоне волн. Результат усовершенствования РЛС П 8. В 1953 году прошла полевые испытания, после чего была принята на вооружение… … Википедия
Радиолокационная станция П-18 — РЛС П 18 1РЛ131 («Терек») мобильная двухкоординатная радиолокационная станция метрового диапазона волн. Прототипом РЛС П 18 является РЛС П 12НА, которая является модернизированным вариантом РЛС дальнего обнаружения самолетов П 12 («Енисей»).… … Википедия
РАДИОЛОКАЦИОННАЯ СТАНЦИЯ — (РЛС; радиолокатор, радар), устройство для обнаружения и определения местоположения объектов методами радиолокации. Первая радиолокационная станция создана в Великобритании в 1936. Применяются в военном деле, на речном, морском, воздушном… … Современная энциклопедия
Радиолокационная станция П-3 — П 3 советская наземная радиолокационная станция обнаружения и наведения. Прошла полевые испытания в августе 1944 года, в течение того же года 14 готовых комплектов РЛС поступило в советские войска. Позднее технология была передана Горьковскому… … Википедия
РАДИОЛОКАЦИОННАЯ СТАНЦИЯ — (радиолокатор радар), устройство для наблюдения за различными объектами (целями) методами радиолокации. Основные элементы: антенная система, передатчик (в пассивных радиолокационных станциях его нет), приемник со световым индикатором и (в… … Большой Энциклопедический словарь
Радиолокационная станция — (РЛС) радиотехническое устройство, предназначенное для обнаружения, опознавания и определения местоположения в пространстве различных объектов (кораблей, самолетов) с помощью отраженных от этих объектов радиоволн, т. е. методом радиолокации.… … Морской словарь
РАДИОЛОКАЦИОННАЯ СТАНЦИЯ — (РЛС, радиолокатор, радар) радиотехническое устройство для обнаружения, опознавания, определения местоположения и удалённости различных объектов на Земле, воде, в воздухе и космосе методом (см.). Основные элементы РЛС: мощный радиопередатчик,… … Большая политехническая энциклопедия
Радиолокационная станция — (РЛС) радиолокатор, радар, устройство для наблюдения за различными объектами (целями) методами радиолокации (См. Радиолокация). Основные узлы РЛС передающее и приёмное устройства, расположенные в одном пункте (т. н. совмещенная РЛС) или в … Большая советская энциклопедия
Радиолокационная станция — Радар Запрос «РЛС» перенаправляется сюда; о регистр … Википедия
dic.academic.ru