
Зеркальная антенна РЛС
Министерство образования и науки Российской Федерации
РГРТА
Кафедра РТС
Пояснительная записка к курсовой работе по дисциплине
«Антенны и устройства СВЧ»
на тему:
«Зеркальная антенна РЛС»
Рязань 2004
Содержание
1. Введение
2. Расчёт геометрических параметров зеркала и облучателя
2.1 Основные параметры усечённого параболоида
2.2 Основные размеры зеркала
2.3 Основные размеры рупора
3. Расчёт основных электрических параметров и уточнение геометрических
3.1 Расчёт диаграммы направленности рупора
3.2 Аппроксимация диаграммы направленности рупора
3.3 Расчёт распределения амплитуды поля на излучающей поверхности зеркала
3.4 Аппроксимация распределения амплитуды поля на излучающей поверхности зеркала
3.5 Диаграмма направленности зеркальной антенны
3.6 Расчёт КНД зеркальной антенны
4. Конструктивный расчёт
4.1 Расчёт профиля зеркала
4.2 Облегчение конструкции зеркала
4.3 Расчёт допуска на точность установки облучателя в фокусе
4.4 Расчет допусков на точность изготовления зеркала
4.5 Описание конструкции
5. Заключение
Список литературы
Приложение
Зеркальные антенны являются наиболее широко распространенным типом антенн в дециметровом и особенно в сантиметровом диапазонах волн. Такое широкое применение зеркальных антенн объясняется относительной простотой их конструкции, возможностью получения диаграммы направленности (ДН) почти любого типа из применяемых на практике, высоким КПД, малой шумовой температурой и т.д. Зеркальные антенны легко позволяют получить равносигнальную зону, а некоторые их типы могут применяться для быстрого перемещения (качания) ДН в пространстве без заметных искажений её формы в значительном секторе углов.
Зеркальные антенны являются наиболее распространённым типом антенн, используемых для радиотелескопов и антенн с очень большой направленностью, применяемых для целей космической связи.
Широко используются зеркала с параболической формой поверхности (параболоид вращения, усечённый параболоид вращения, параболический цилиндр.), также распространены сферические зеркальные антенны, двухзеркальные антенны.
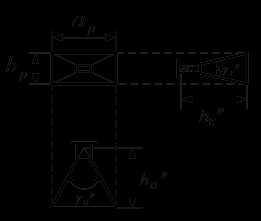
 — фокус; — фокусное расстояние; — размер раскрыва в вертикальной плоскости; — размер раскрыва в горизонтальной плоскости; — угол раскрыва (апертурный угол) в вертикальной плоскости; — угол раскрыва (апертурный угол) в горизонтальной плоскости.
— фокус; — фокусное расстояние; — размер раскрыва в вертикальной плоскости; — размер раскрыва в горизонтальной плоскости; — угол раскрыва (апертурный угол) в вертикальной плоскости; — угол раскрыва (апертурный угол) в горизонтальной плоскости.Основные размеры зеркала определим из выражения для коэффициента направленного действия (КНД)
[1], где — площадь раскрыва зеркала; — коэффициент использования поверхности; — рабочая длина волны антенны. КНД равен заданному коэффициенту усиления , если принять КПД антенны , т.к. , .Для передающей зеркальной антенны необходимо обеспечить такое облучение, чтобы ослабление поля на краях по всему контуру зеркала было одинаково и составляло 10-14 дБ относительно его центра. С учётом этого условия определяем коэффициент использования поверхности по таблице приведенной в [2]:
Теперь можно определить площадь раскрыва:
.Так как по заданию
, то примем и получим следующие значения , .Зададимся углом раскрыва зеркала в вертикальной плоскости
. Для передающих антенн апертурный угол лежит в пределах . [1] Возьмём . По углу определяем фокусное расстояние зеркала: , по которому определяем угол раскрыва в горизонтальной плоскости .Так как на краях зеркала должно быть обеспечено ослабление поля 10 дБ, то ширина нормированной диаграммы направленности облучателя по мощности на уровне 0,1 (по напряжённости на уровне 0,3) должна быть равной углу раскрыва зеркала.
В качестве облучателя возьмем пирамидальный рупорный облучатель, возбуждаемый прямоугольным волноводом.
Размеры раскрыва рупора выберем по требуемой диаграмме направленности в соответствующей плоскости. Ширина диаграммы направленности связана с размерами раскрыва
и следующими соотношениями: , , откуда получаем , ,где
— ширина нормированной диаграммы направленности рупора по напряжённости на уровне 0,3 в плоскости Н, — ширина нормированной диаграммы направленности рупора по напряжённости на уровне 0,3 в плоскости Е. Рассчитаем высоты рупора в плоскости Е и в плоскости Н: ,Выберем стандартный волновод по заданной длине волны
из таблицы приведённой в [4]. Возьмём волновод R-70 с размерами и предельной мощностью .Пересчитаем по уравнению стыковки высоту рупора в плоскости Е
[2].Углы раскрыва рупора в плоскости Е и в плоскости Н:
Нормированная диаграмма направленности рупора в плоскости Е:
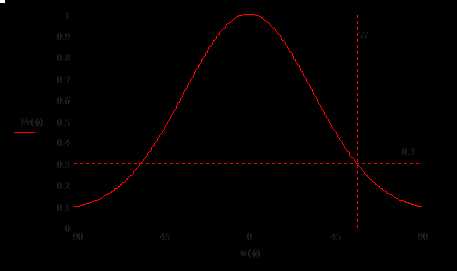
Нормированная диаграмма направленности рупора в плоскости Н:
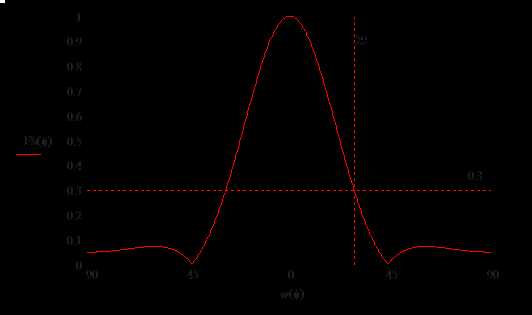
Аппроксимируем диаграмму направленности рупора в плоскости Е в пределах главного лепестка функцией
и для полученного значения определим максимальный коэффициент использования поверхности зеркала и соответствующий ему оптимальный угол раскрыва зеркала в вертикальной плоскости .mirznanii.com
Американские самолётные РЛС с фазированной антенной решёткой
Мероприятия по дальнейшему наращиванию боевой мощи ВВС США предусматривают создание не только новых, более совершенных самолётов, но и различного оборудования, применение которого расширило бы их боевые возможности. В частности, командование американских ВВС большое внимание уделяет разработке многофункциональных самолётных радиолокационных станций, которые обеспечивали бы обнаружение воздушных, наземных и надводных целей (одновременно нескольких) и определение их координат, управление бортовым оружием, оценку рельефа местности в интересах обеспечения безопасности полётов на малых высотах. Американские специалисты считают, что последовательное или одновременное выполнение РЛС нескольких функций в значительной мере зависит от скорости и полноты обзора пространства, то есть от того, насколько быстро луч РЛС будет перемещаться в заданном секторе и изменять свою форму (диаграмму направленности). Отмечается, что для поиска и сопровождения воздушных целей необходима острая диаграмма направленности, сканирующая в пределах всей передней полусферы, а для обзора земной поверхности — плоская диаграмма (косеканс квадратной формы по углу места), сканирующая по азимуту в нижней части передней полусферы. В целях эффективного обеспечения полёта на малых высотах необходимо быстрое сканирование луча РЛС как в вертикальной, так и в горизонтальной плоскости.Существующие антенные системы, в которых для формирования диаграммы направленности луча используются параболические отражатели высокочастотных сигналов, не позволяют одной РЛС выполнять несколько функций. Такие антенны, по оценке американских специалистов, не имеют необходимой для многофункциональной РЛС ширины сектора обзора пространства, обладают недостаточной скоростью сканирования луча, имеют большой вес и объём, а также низкую надёжность, то есть они не подходят для РЛС, предназначенных для одновременного действия по нескольким целям и выполнения различных функций. Поэтому, например, на самолёте FB-111 для обеспечения выполнения всех его боевых задач устанавливаются две РЛС и три антенны.
В связи с этим в США уже в начале 60-х годов начались работы по созданию принципиально новых антенн для самолётных многофункциональных РЛС. Эти антенны представляют собой фазированные антенные решётки (ФАР). Иностранная печать отмечает, что основное преимущество ФАР перед обычной отражательной (зеркальной) антенной заключается в электронном управлении лучом, которое обеспечивается изменением по определённому закону фазы излучаемого сигнала каждого из элементарных излучателей. В решётке может быть от нескольких сотен до нескольких тысяч таких излучателей. Время перемещения луча между двумя крайними положениями не превышает нескольких микросекунд, при этом возможно быстрое изменение формы диаграммы направленности. Существенной особенностью работы ФАР является необходимость включения в комплект РЛС электронной вычислительной машины, которая может достаточно быстро управлять одновременно всеми излучателями решётки. ФАР обеспечивает более широкий сектор обзора, чем обычная антенна, а благодаря неподвижной конструкции её удобно размещать под обтекателем на борту самолёта. Исключаются также тяжелые и громоздкие электромеханические или гидравлические устройства управления и повышается живучесть РЛС, так как она выполняет свои функции даже при выходе из строя значительного количества элементарных излучателей.
Американские специалисты одним из перспективных направлений в развитии ФАР считают создание так называемых «конформированных решёток», элементы которых будут располагаться по сложной выпуклой поверхности различных участков обшивки самолёта. При этом может увеличиться зона обзора и освободиться значительный полезный объём в носовой части самолёта для размещения других радиоэлектронных средств или вооружения.
Наиболее перспективными, несмотря на сложность электрических схем, иностранные специалисты считают так называемые «активные» ФАР, в которых элементарные излучатели являются самостоятельными приемопередатчиками. Такие ФАР позволяют с высоким КПД реализовать энергетические возможности высокочастотных генераторов и значительно повысить надежность работы РЛС. Существенным препятствием при создании таких РЛС является отсутствие в настоящее время достаточно экономичных, легких и мощных твердотельных высокочастотных генераторов или усилителей мощности. Поэтому в США в качестве промежуточных вариантов ФАР разрабатываются пассивные линзовые антенны (отражательные или проходные), а которых для формирования требуемых диаграмм направленности применяется решётка высокочастотных фазовращателей, облучаемая широким лучом от единого источника мощного высокочастотного сигнала.
В зависимости от способа подачи высокочастотных сигналов имеются пассивные проходные ФАР двух видов: с открытой волноводной системой, когда решётка облучается одним широким лучом от слабонаправленного источника, и с закрытой, когда передаваемый высокочастотный сигнал подается к элементарным фазовращателям решётки при помощи разветвленной системы волноводов.
Один из вариантов пассивной проходной ФАР с закрытой волноводной системой — волноводная щелевая решётка, в которой излучающими элементами являются щели в стенках волноводов. Управление фазой высокочастотного сигнала в такой решётке производится не в отдельном элементе, а в группе элементов путем применения группового фазовращателя в соответствующем отрезке волновода. В данном случае возможности электрического управления диаграммой направленности ФАР в плоскости, проходящей вдоль отрезка волновода, резко уменьшаются, и в связи с этим возникает необходимость использования механического сканирования луча.
Одной из основных частей элементарной ячейки ФАР является высокочастотный фазовращатель. Обычно фазовращатели выполняются на ферритах или реактивных диодах, причем, несмотря на значительные вносимые потери и малую допустимую рассеиваемую мощность, предпочтение отдается последним из-за их небольшого веса, простоты управления и высокой скорости переключения.
Управление фазовращателями обычно осуществляется с помощью сигналов, поступающих от цифровой ЭВМ. В иностранной печати отмечается, что если сигналы имеют малое количество разрядов, то уменьшается количество фиксированных значений фазы высокочастотного сигнала и при установке луча РЛС возникают ошибки квантования, а увеличение разрядности управляющих сигналов приводит к усложнению конструкции фазовращателей и возрастанию их веса.
Американские специалисты провезти опыты по оценке этих ошибок путем учёта падения мощности излучения в требуемом направлении при максимальной ошибке квантования и получили следующие результаты: при одноразрядном управляющем сигнале (установка фазы через 180°) это падение составляет 4 дб (60%), а при двухразрядном (установка фазы через 90°) — всего 0,9 дб (20%). Из этого был сделан вывод, что для большинства самолётных РЛС оптимальным является управление двухразрядным сигналом. При этом считается, что ошибка квантования вполне компенсируется за счёт большой скорости перемещения луча и дальнейшей обработки принятого сигнала.
В результате проводимых работ в США во второй половине 60-х годов фирмы «Тексас инструментс», «Макссон электроникс», «Хьюз эркрафт», «Рейтеон» и некоторые другие разработали ряд опытных образцов РЛС, имеющих активные и пассивные ФАР и электронное управление луча. Краткое описание некоторых из них приводится ниже.
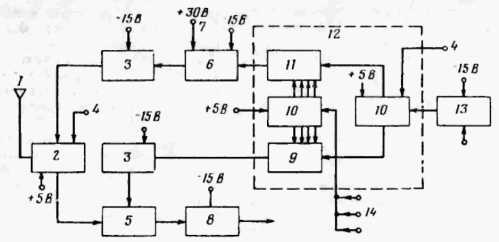
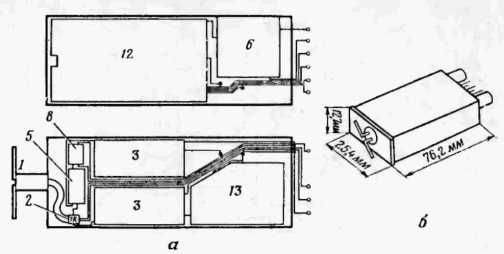
РЛС MERA (Molecular Electronics for Radar Application), созданная специалистами фирмы «Тексас инструментс», является одной из первых станций с активной ФАР. Впервые эта РЛС была продемонстрирована в 1968 году. Её антенная решётка состоит из 604 твердотельных модулей, которые работают в 3-см диапазоне волн. Блок-схема одного такого модуля показана на рис. 1. При передаче для возбуждения модулей используются сигналы частотой 2250 МГц, а при приеме отраженных сигналов — гетеродины, работающие на частоте 2125 МГц. Компоновка, внешний вид и размеры модуля показаны на рис. 2 (цифровые обозначения соответствуют обозначениям на рис. 1). Элементы модулей на площади ФАР были размещены по эмпирическому положению: два-три модуля на площадь, равною квадрату длины волны РЛС. Для достижения мощности в импульсе бортовой РЛС (предназначенной для обзора земной поверхности), равной 60 кВт, предполагалось использовать модули мощностью излучения по 100 Вт. Однако технические возможности выполнения твердотельных усилителей такой мощности в заданных габаритах оказались нереальными, и возникший при этом энергетический дефицит был компенсирован за счет применения схем сжатия импульсов. Сообщалось, что среднее расчётное время наработки РЛС на один отказ составило несколько сотен часов.
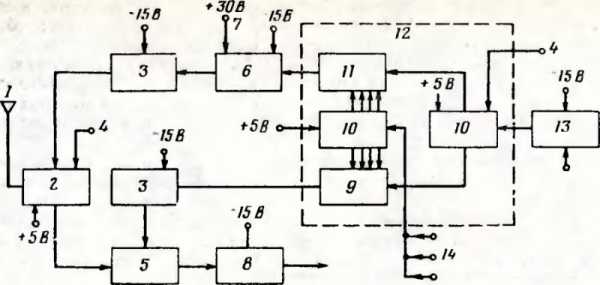
Рис. 1. Блок-схема модуля РЛС MERA: 1 — антенна; 2 — антенный переключатель; 3 — умножитель частоты; 4 — сигнал переключения с приема на передачу; 5 — смеситель; 6 — импульсный усилитель; 7 — импульсный сигнал модуляции; 8 — усилитель промежуточной частоты; 9 — фазовращатель приемного тракта, 10 — логическая схема управления; 11 — фазовращатель передающего тракта; 12 — фазосдвигающее устройство; 13 — усилитель мощности; 14 — управляющие сигналы от ЭBM
Опыт разработки, схемы и некоторые конструктивные решения экспериментальной РЛС MERA были использованы при создании в начале 70-х годов опытного образца РЛС RASSR (Reliable Advanced Solid State Radar). Специалисты фирмы считали, что эта РЛС вполне может быть установлена на перспективных тактических самолётах 70-х годов. Её ФАР состояла из 1648 приемопередающих модулей, сходных по принципу построения с модулями РЛС MLRA.
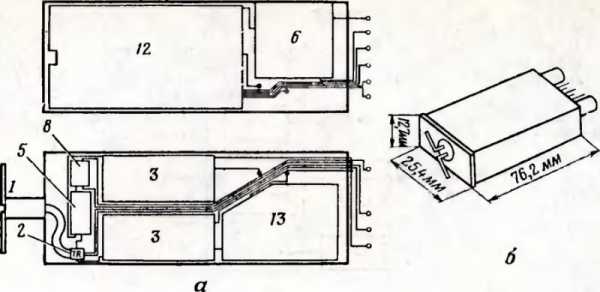
Рис. 2 Модуль РЛС MERA: а — расположение основных элементов в верхней и нижней частях модуля; б — внешний вид модуля в собранном виде
Фирма «Макссон электронике» по заказу командования авиации ВМС США разработала опытный образец РЛС 1-см диапазона с отражательной ФАР. Эта РЛС в 1969 году была установлена на самолёте А-6 для проведения летных испытаний. ФАР диаметром 72 см состояла из 1500 элементов с высокочастотными фазовращателями на реактивных диодах. Размеры каждого из элементов — 98x10x10 мм. Сигнал на решётку подавался от четырёхрупорного облучателя. Управление фазовращателями решётки осуществлялось с помощью сигналов, поступающих от легкой малогабаритной бортовой ЭВМ весом 2,3 кг, которая обеспечивала установку луча в течение 250 мкс. Электроснабжение РЛС производилось от специального блока питания весом 2,7 кг. Потребляемая мощность станции 700 Вт.
По сообщениям иностранной печати, специалисты этой фирмы на базе вышеупомянутого опытного образца разработали проект усовершенствованной РЛС с ФАР диаметром 144 см, состоящей из 6000 элементов. Расчетный вес такой решётки 77 кг, а стоимость 150 тыс. долларов. Фазовращатели решётки выдерживают мощность излучения более 2 Вт, поэтому американские специалисты считают, что такая РЛС могла бы обладать мощностью в импульсе 1,5 МВт, а этого вполне достаточно для самолётных станций любого класса. Для такой РЛС предполагалось использовать модифицированную ЭВМ, которая обеспечивает установку луча за 1,5 мкс.
Для перспективных истребителей-перехватчиков авиации ВМС США в 1969 году фирмой «Хьюз эркрафт» была разработана РЛС ESIRA (Electronically Scanned Interceptor Radar Antenna). Её пассивная отражательная ФАР диаметром около 150 см состоит из 2400 элементов и четырёхрупорного облучателя.
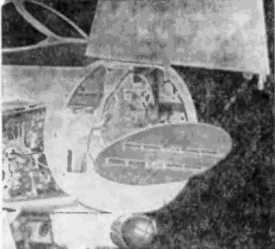
По заказу командования ВВС США американская фирма «Рейтеон» разработала РЛС AN/APQ-140, которая предназначалась для установки на сверхзвуковой стратегический бомбардировщик В-1 «Лансер», создаваемый фирмой «Боинг». Опытный образец этой РЛС с отражательной ФАР диаметром около 70 см, состоящей из 3300 элементов (рис. 3), прошёл летные испытания на специальном самолёте. Однако по ряду причин принятие этой РЛС на вооружение было отложено, и на первых этапах серийного производства самолёта В-1 на него планируется устанавливать не одну многофункциональную РЛС, а комплект станций, представляющий собой усовершенствованный вариант комплекта РЛС самолёта.
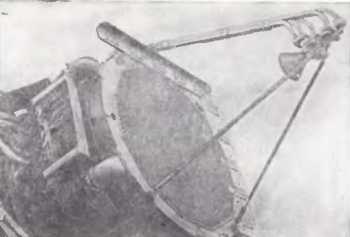 Pис. 3 Внешний вид РЛС AN/APQ-140
Pис. 3 Внешний вид РЛС AN/APQ-140
Зарубежная печать сообщает, что интенсивные работы по созданию самолётных РЛС с ФАР, проводимые в США со второй половины 60-х годов, не дали ожидаемых результатов. В связи с техническими трудностями, возникшими при реализации проектов, и недостаточно высокой надёжностью твердотельных элементов ФАР современные американские боевые самолёты до сих пор не имеют бортовых РЛС с полным электронным управлением луча. Кроме того, существенное влияние на выполнение программ оказала высокая стоимость работ.
По данным иностранной печати, в США при создании многофункциональных РЛС применяется промежуточный конструктивный вариант ФАР, представляющий собой волноводную щелевую решётку с закрытой фидерной системой и питанием от общего высокочастотного генератора мощности. Как указывалось ранее, ограниченное электронное управление диаграммой направленности в такой антенне должно сочетаться с механическим сканированием её решётки. Однако, несмотря на это, они имеют преимущества перед обычными антеннами. В частности, отмечается, что тщательная фазировка излучателей значительно уменьшает уровень боковых лепестков, а отсутствие вынесенного вперёд облучателя или контррефлектора позволяет при данных размерах обтекателя увеличить диаметр антенны и её предельные угловые отклонения, а следовательно, сузить диаграмму направленности и увеличить зону обзора. Кроме того, приближение центра тяжести антенной системы к узлам её подвески позволяет значительно упростить их конструкцию и повысить скорость перемещения антенны.
В США уже разработаны РЛС нескольких типов с щелевыми антенными решётками.
Например, на многоцелевых палубных истребителях F-14 «Томкэт» устанавливаются созданные фирмой «Хьюз эркрафт» РЛС системы управления оружием AN/AWG-9 (рис. 4). Сообщается, что сочетание в данной РЛС электронного и быстрого механического сканирования луча обеспечивает одновременное сопровождение нескольких воздушных целей. На базе этой станции фирма разработала серию РЛС «Атлас», которые планируется устанавливать на перспективных тактических самолётах. Антенну аналогичного типа (в виде щелевой волноводной решётки) применила фирма «Юнайтед эркрафт» в РЛС «Меркурий», которую предполагается использовать на перспективном истребителе ВВС США. Антенна РЛС «Меркурий», макет которой демонстрировался фирмой в конце 1974 года, представляет собой 30 горизонтальных отрезков волноводов со щелевыми излучателями, расположенными в узких стенках волноводов. Её конструкция обеспечивает механическое сканирование по азимуту в пределах ±70° и электронное до 50° по углу места.
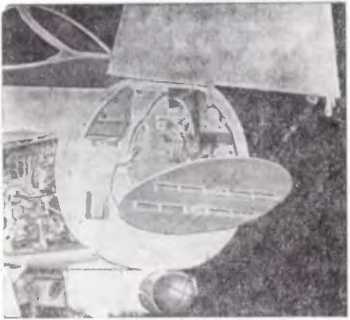 Рис. 4 Бортовая РЛС с щелевой волноводной ФАР, установленная в носовой части самолёта F-14
Рис. 4 Бортовая РЛС с щелевой волноводной ФАР, установленная в носовой части самолёта F-14
Американская печать отмечает, что благодаря своим преимуществам и относительно несложной конструкции щелевые волноводные антенные решётки найдут применение не только в многофункциональных, но и в более простых самолётных бортовых РЛС. В частности, фирма «Бендикс» разработала обзорную навигационную РЛС RDR-1400 (рис. 5), у которой антенная решётка обеспечивает только формирование луча, а обзор по обеим угловым координатам (азимуту и углу места) осуществляется за счёт механического её вращения. RDR-1400 имеет узкую диаграмму направленности и предназначена для обнаружения малоразмерных надводных целей. Её намечается устанавливать на патрульные и поисково-спасательные самолёты и вертолеты.
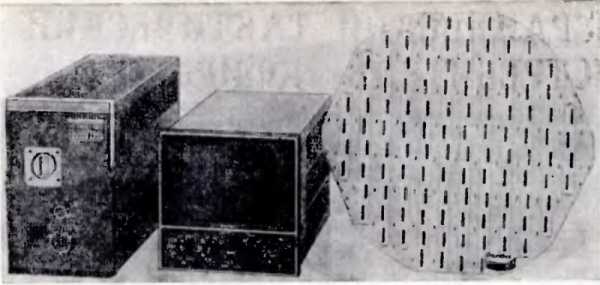
Рис. 5. Основные блоки и ФАР обзорной навигационной РЛС RDR-1400
Многие иностранные специалисты считают, что в течение ближайших лет наиболее вероятным типом антенны самолётных многофункциональных РЛС будет щелевая волноводная решётка с частичным механическим сканированием, а принятие на вооружение РЛС, имеющих полностью электронное управление луча, следует ожидать не ранее начала 80-х годов.
www.zvo.su
Линзовая антенна РЛС и ППФ
Федеральное агентство по образованию
ТОМСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ СИСТЕМ УПРАВЛЕНИЯ И РАДИОЭЛЕКТРОНИКИ
(ТУСУР)
Кафедра телевидения и управления
(ТУ)
АНТЕННА РЛС И ППФ
Пояснительная записка к курсовой работе по дисциплине
«Антенны и устройства СВЧ»
Студент гр.
______
“__”______
Преподаватель:
_____.
“__”______.
Содержание
1 Введение ……………………………………………………………..…..5
2 Основная часть ………………………………………………………….6
2.1Обзор по РЛС ………………………………………………………..…6
2.2Назначение и принцип действия линзовых антенн ………………….7
2.3 Выбор размеров линзы ……………………………………………..…9
2.4Расчет облучателя …………………………………………………….11
2.5Расчет диаграммы направленности и коэффициента усиления …..14
2.5.1Диаграмма направленности в горизонтальной плоскости ……….14
2.5.2Диаграмма направленности в вертикальной плоскости …………15
2.5.3Коэффициент направленного действия (КНД) ………………..…18
2.6Расчет питающего волновода ………………………………………..20
2.7 Расчет дальности связи с учетом атмосферы ……………………….22
2.8Расчет ППФ и его АЧХ ……………………………………………….23
2.8.1Расчет низкочастотного фильтра прототипа ……………………..23
2.8.2Расчет ППФ ……………………………………………..…………..26
2.8.3 Реализация ППФ …………………………………………………. 27
2.8.4 Расчет АЧХ ……………………………………………………….. 29
3 Заключение ……………………………………………………………..31
Список использованных источников ………………………………..32
1 Введение
Неотъемлемыми составными частями современных радиотехнических средств являются антенные системы и обслуживающие их тракты СВЧ.
К антеннам современных радиосистем предъявляют много требований, среди которых решающее значение имеют два. Первое требование – направленность действия, т.е. распределение электромагнитной мощности в пространстве по определенному закону. Второе требование – излучение или радиоприем должны сопровождаться минимальными потерями электромагнитной мощности на нагрев проводников и диэлектриков антенны, т.е. антенна должна иметь высокий КПД.
Цель данной курсовой работы является систематизирование знаний, полученных при изучении дисциплин «Антенны и устройства СВЧ» и «Распространение радиоволн». Для чего необходимо рассчитать линзовую антенну, исследовать ее, и спроектировать полосовой фильтр.
2 Основная часть
2.1 Обзор по РЛС
Радиолокация (от радио… и лат. locatio — размещение, расположение), область науки и техники, предметом которой является наблюдение радиотехническими методами (радиолокационное наблюдение) различных объектов (целей) — их обнаружение, распознавание, измерение их координат (определение местоположения) и производных координат и определение др. характеристик. Под радиолокацией понимают также сам процесс радиолокационного наблюдения (локации) объектов. Задачи радиолокации решаются при помощи отдельных радиолокационных станций (РЛС) и сложных радиолокационных систем. Радиолокация — одно из важнейших направлений современной радиоэлектроники .
Для радиолокационного наблюдения используют: эхо-сигналы, образующиеся в результате отражения радиоволн от объекта, облученного РЛС; сигналы РЛС, переизлучаемые ретранслирующим устройством, находящимся на объекте, местоположение которого определяется; собственное радиоизлучение объекта — излучение радиоустройств, находящихся на объекте, или тепловое излучение самого объекта, определяющееся его температурой (пассивная радиолокация ). Так, в наземных РЛС обнаружения воздушных целей, ожидаемых на некоторой высоте, для рационального использования мощности, излучаемой антенной, выбирают антенны с такой диаграммой направленности, чтобы во всём рабочем секторе обеспечивалось постоянство принимаемых сигналов независимо от дальности.
В радиолокации измеряют расстояние до объекта, направление прихода сигналов (пеленгация ), радиальную и угловую скорости движения объекта и т.д. Радиолокационное наблюдение объектов позволяет также выявлять их многие характерные особенности, например, определять параметры ледового покрова водной поверхности, влагосодержание атмосферы, размеры и конфигурацию объекта и т.п. Данные измерений могут быть дискретными (вырабатываемыми через определённые интервалы времени) или непрерывными.
При помощи радиолокаторов обнаруживаются облака, осадки, области повышенных градиентов температуры и влажности, ионизированные следы молниевых разрядов и др. Из радиолокационных наблюдений получают информацию о пространственном положении, перемещении, структуре, форме и размерах обнаруживаемых объектов, а также их физических свойствах.
Появление и развитие радиолокации
Явление отражения радиоволн наблюдал ещё Г. Герц в 1886 — 89. Влияние корабля, пересекающего трассу радиоволн, на силу сигнала зарегистрировал А. С. Попов в 1897. Впервые идея обнаружения корабля по отражённым от него радиоволнам была четко сформулирована в авторской заявке немецкого инженера К. Хюльсмайера (1904), содержавшей также подробное описание устройства для её реализации.
Интерференцию незатухающих радиоволн, приходящих к приёмнику по двум путям — от передатчика и, после отражения, от движущегося судна, — впервые наблюдали американский инженер А. Тейлор и Л. Юнг в 1922, а интерференцию при отражении радиоволн от самолёта — американский инженер Б. Тревор и П. Картер в 1932.
В СССР работы по радиолокации были развёрнуты с 1933 по инициативе М. М. Лобанова, под руководством Ю. К. Коровина и П. К. Ощепкова. Первые практически использовавшиеся РЛС, действие которых было основано на появлении биений при пересечении самолётом линии передатчик — приёмник, разработаны под руководством Д. С. Стогова в 1938. Импульсный метод Р. разработан в 1937 в Ленинградском физико-техническом институте под руководством Ю. Б. Кобзарева .
Последующее развитие радиолокации, её внедрение в различные виды вооружения и народное хозяйство связаны с освоением диапазона СВЧ, совершенствованием методов радиолокации, внедрением вычислительной техники и использованием достижений смежных наук. Особое значение имела разработка радиолокационных измерительных устройств для зенитной и корабельной артиллерии. Появление и применение противорадиолокационных средств — пассивных и активных помех, защитных покрытий, вызвали необходимость разработки специальных противопомеховых методов и устройств.
Появление (в 50 — 60-х гг.) ракетной и космической техники усложнило и расширило задачи радиолокации. Создание ракет и космических летательных аппаратов (КЛА) потребовало точного измерения траектории и параметров их движения с целью управления ими, прогнозирования траектории точной посадки КЛА на Землю и др. планеты, точной географической привязки количественных результатов научных измерений, данных метеорологической обстановки, фотоснимков и т.п. к координатам КЛА, измерения взаимного положения КЛА. Одно из достижений радиолокации — решение задачи поиска и сближения двух КЛА, включая их автоматическую стыковку.
Важная область применения радиолокации — планетная радиолокация, позволившая путём приёма радиосигналов, отражённых от планет, с большой точностью измерить расстояние до них и тем самым снизить погрешность в определении основной астрономической единицы ,уточнить параметры орбит планет, определить период вращения планет и осуществить радиолокационное наблюдение рельефа поверхности планет.
При создании систем противоракетной обороны (ПРО) радиолокация должна решать сложные задачи, связанные с уничтожением ракет противника, в том числе с обнаружением и сопровождением ракет и наведением на них противоракет.
2.2 Назначение и принцип действия линзовых антенн
Линзовой антенной называют совокупность электромагнитной линзы и облучателя. Они относятся к антеннам оптического типа и используются, как правило, в диапазоне сантиметровых и дециметровых волн для создания достаточно узких диаграмм направленности. В некоторых случаях линзовая антенна может использоваться в качестве вспомогательного элемента какой-либо антенны, улучшающего ее характеристики (например, для выравнивания фазы в раскрыве рупорной антенны). Линзовая антенна представляет собой прозрачное для радиоволн ограниченное обычно двумя поверхностями тело, коэффициент преломления которого отличен от коэффициента преломления окружающей среды [1] .
Назначение линзы состоит в том, чтобы трансформировать соответствующим образом фронт волны, создаваемый облучателем. Изменяя форму волновой поверхности, линза тем самым формирует некоторую диаграмму направленности.
Принципиально линзовые антенны можно использовать для формирования различных диаграмм направленности. Однако на практике линзовые антенны подобно оптическим линзам применяются, главным образом, для превращения расходящегося пучка лучей в параллельный, то есть для превращения криволинейной (сферической или цилиндрической) волновой поверхности.
Как известно, плоский фронт волны при его достаточной площади обеспечивает острую направленность излучения. С помощью линзовых антенн можно получить диаграмму направленности с углом раствора всего лишь в несколько угловых минут.
Принцип действия линзы основан на том, что линза представляет собой среду, в которой фазовая скорость распространения электромагнитных волн либо больше скорости света (
), либо меньше ее (). В соответствии с этим линзы разделяются на ускоряющие () и замедляющие ().mirznanii.com
Американские самолётные РЛС с фазированной антенной решёткой (1975) — 1970 — 1990 гг — Материалы посвящены — Top secret
Подполковник-инженер М. Михов
Мероприятия по дальнейшему наращиванию боевой мощи ВВС США предусматривают создание не только новых, более совершенных самолетов, но и различного оборудования, применение которого расширило бы их боевые возможности. В частности, командование американских ВВС большое внимание уделяет разработке многофункциональных самолетных радиолокационных станций, которые обеспечивали бы обнаружение воздушных, наземных и надводных целей (одновременно нескольких) и определение их координат, управление бортовым оружием, оценку рельефа местности в интересах обеспечения безопасности полетов на малых высотах.
Американские специалисты считают, что последовательное или одновременное выполнение РЛС нескольких функций в значительной мере зависит от скорости и полноты обзора пространства, то есть от того, насколько быстро луч РЛС будет перемещаться в заданном секторе и изменять свою форму (диаграмму направленности). Отмечается, что для поиска и сопровождения воздушных целей необходима острая диаграмма направленности, сканирующая в пределах всей передней полусферы, а для обзора земной поверхности — плоская диаграмма (косекансквадратной формы по углу места), сканирующая по азимуту в нижней части передней полусферы. В целях эффективного обеспечения полета на малых высотах необходимо быстрое сканирование луча РЛС как в вертикальной, так и в горизонтальной плоскости.
Существующие антенные системы, в которых для формирования диаграммы направленности луча используются параболические отражатели высокочастотных сигналов, не позволяют одной РЛС выполнять несколько функций. Такие антенны, по оценке американских специалистов, не имеют необходимой для многофункциональной РЛС ширины сектора обзора пространства, обладают недостаточной скоростью сканирования луча, имеют большой вес и объем, а также низкую надежность, то есть они не подходят для РЛС, предназначенных для одновременного действия по нескольким целям и выполнения различных функций. Поэтому, например, на самолете FB-111 для обеспечения выполнения всех его боевых задач устанавливаются две РЛС и три антенны.
В связи с этим в США уже в начале 60-х годов начались работы по созданию принципиально новых антенн для самолетных многофункциональных РЛС. Эти антенны представляют собой фазированные антенные решетки (ФАР). Иностранная печать отмечает, что основное преимущество ФАР перед обычной отражательной (зеркальной) антенной заключается в электронном управлении лучом, которое обеспечивается изменением по определенному закону фазы излучаемого сигнала каждого из элементарных излучателей. В решетке может быть от нескольких сотен до нескольких тысяч таких излучателей. Время перемещения луча между двумя крайними положениями не превышает нескольких микросекунд, при этом возможно быстрое изменение формы диаграммы направленности. Существенной особенностью работы ФАР является необходимость включения в комплект РЛС электронной вычислительной машины, которая может достаточно быстро управлять одновременно всеми излучателями решетки. ФАР обеспечивает более широкий сектор обзора, чем обычная антенна, а благодаря неподвижной конструкции ее удобно размещать под обтекателем на борту самолета. Исключаются также тяжелые л громоздкие электромеханические или гидравлические устройства управления и повышается живучесть РЛС, так как она выполняет свои функции даже при выходе из строя значительного количества элементарных излучателей.
Американские специалисты одним из перспективных направлений в развитии ФАР считают создание так называемых «конформированных решеток», элементы которых будут располагаться по сложной выпуклой поверхности различных участков обшивки самолета. При этом может увеличиться зона обзора и освободиться значительный полезный объем в носовой части самолета для размещения других радиоэлектронных средств или вооружения.
Наиболее перспективными, несмотря на сложность электрических схем, иностранные специалисты считают так называемые «активные» ФАР, в которых элементарные излучатели являются самостоятельными приемопередатчиками. Такие ФАР позволяют с высоким КПД реализовать энергетические возможности высокочастотных генераторов и значительно повысить надежность работы РЛС. Существенным препятствием при создании таких РЛС является отсутствие в настоящее время достаточно экономичных, легких и мощных твердотельных высокочастотных генераторов или усилителей мощности. Поэтому в США в качестве промежуточных вариантов ФАР разрабатываются пассивные линзовые антенны (отражательные или проходные), в которых для формирования требуемых диаграмм направленности применяется решетка высокочастотных фазовращателей, облучаемая широким лучом от единого источника мощного высокочастотного сигнала.
В зависимости от способа подачи высокочастотных сигналов имеются пассивные проходные ФАР двух видов: с открытой волноводной системой, когда решетка облучается одним широким лучом от слабонаправленного источника, и с закрытой, когда передаваемый высокочастотный сигнал подается к элементарным фазовращателям решетки при помощи разветвленной системы волноводов.
Один из вариантов пассивной проходной ФАР с закрытой волноводной системой — волноводная щелевая решетка, в которой излучающими элементами являются щели в стенках волноводов. Управление фазой высокочастотного сигнала в такой решетке производится не в отдельном элементе, а в группе элементов путем применения группового фазовращателя в соответствующем отрезке волновода. В данном случае возможности электрического управления диаграммой направленности ФАР в плоскости, проходящей вдоль отрезка волновода, резко уменьшаются, и в связи с этим возникает необходимость использования механического сканирования луча.
Одной из основных частей элементарной ячейки ФАР является высокочастотный фазовращатель. Обычно фазовращатели выполняются на ферритах или реактивных диодах, причем, несмотря на значительные вносимые потери и малую допустимую рассеиваемую мощность, предпочтение отдается последним из-за их небольшого веса, простоты управления и высокой скорости переключения.
 |
| Рис. 1. Блок-схема модуля РЛС MERA: 1 — антенна; 2 — антенный переключатель; 3 — умножитель частоты; 4 — сигнал переключения с приема на передачу; 5 — смеситель; 6 — импульсный усилитель; 7 — импульсный сигнал модуляции; 8 — усилитель промежуточной частоты; 9 — фазовращатель приемного тракта, 10 — логическая схема управления; 11 — фазовращатель передающего тракта; 12 — фазосдвигающее устройство; 13 — усилитель мощности; 14 — управляющие сигналы от ЭВМ |
 |
| Рис, 2. Модуль РЛС MERA. а — расположение основных элементов в верхней и нижней частях модуля; б — внешний вид модуля в собранном виде |
Управление фазовращателями обычно осуществляется с помощью сигналов, поступающих от цифровой ЭВМ В иностранной печати отмечается, что если сигналы имеют малое количество разрядов, то уменьшается количество фиксированных значении фазы высокочастотного сигнала и при установке луча РЛС возникают ошибки квантования, а увеличение разрядности управляющих сигналов приводит к усложнению конструкции фазовращателей и возрастанию их веса. Американские специалисты провели опыты по оценке этих ошибок путем учета падения мощности излучения в требуемом направлении при максимальной ошибке квантования и получили следующие результаты: при одноразрядном управляющем сигнале (установка фазы через 180°) это падение составляет 4 дб (60 проц.), а при двухразрядном (установка фазы через 90°) — всего 0,9 дб (20 проц.). Из этого был сделан вывод, что для большинства самолетных РЛС оптимальным является управление двухразрядным сигналом. При этом считается, что ошибка квантования вполне компенсируется за счет большой скорости перемещения луча и дальнейшей обработки принятого сигнала.
В результате проводимых работ в США во второй половине 60-х годов фирмы «Тексас инструменте», «Макссон электроникс», «Хьюз эркрафт», «Рейтеон» и некоторые другие разработали ряд опытных образцов РЛС, имеющих активные и пассивные ФАР и электронное управление луча. Краткое описание некоторых из них приводится ниже.
РЛС MERA (Molecular Electronics for Radar Application), созданная специалистами фирмы «Тексас инструменте», является одной из первых станций с активной ФАР. Впервые эта РЛС была продемонстрирована в 1968 году. Ее антенная решетка состоит из 604 твердотельных модулей, которые работают в 3-см диапазоне волн Блок-схема одного такого модуля показана на рис. 1 При передаче для возбуждения модулей используются сигналы частотой 2250 МГц, а при приеме отраженных сигналов — гетеродины, работающие на частоте 2125 МГц. Компоновка, внешний вид и размеры модуля показаны на рис. 2 (цифровые обозначения соответствуют обозначениям на рис. 1). Элементы модулей на площади ФАР были размещены по эмпирическому положению: два-три модуля на площадь, равную квадрату длины волны РЛС. Для достижении мощности в импульсе бортовой РЛС (предназначенной для обзора земной поверхности), равной 60 кВт, предполагалось использовать модули мощностью излучения по 100 Вт Однако технические возможности выполнения твердотельных усилителей такой мощности в заданных габаритах оказались нереальными, и возникший при этом энергетический дефицит был компенсирован за счет применения схем сжатия импульсов. Сообщалось, что среднее расчетное время наработки РЛС на один отказ составило несколько сотен часов.
Опыт разработки, схемы и некоторые конструктивные решения экспериментальной РЛС MERA были использованы при создании в начале 70-х годов опытного образца РЛС RASSR (Reliable Advanced Solid State Radar), Специалисты фирмы считали, что эта РЛС вполне может быть установлена на перспективных тактических самолетах 70-х годов. Ее ФАР состояла из 1648 приемопередающих модулей, сходных по принципу построения с модулями РЛС MERA.
Фирма «Макссон электроникс» по заказу командования авиации ВМС США разработала опытный образец РЛС 1-см диапазона с отражательной ФАР. Эта РЛС в 1969 году была установлена на самолете А-6 для проведения летных испытаний. ФАР диаметром 72 см состояла из 1500 элементов с высокочастотными фазовращателями на реактивных диодах. Размеры каждого из элементов — 98х10×10 мм. Сигнал на решетку подавался от четырехрупорного облучателя. Управление фазовращателями решетки осуществлялось с помощью сигналов, поступающих от легкой малогабаритной бортовой ЭВМ весом 2,3 кг, которая обеспечивала установку луча в течение 250 мкс. Электроснабжение РЛС производилось от специального блока питания весом 2,7 кг. Потребляемая мощность станции 700 Вт.
По сообщениям иностранной печати, специалисты этой фирмы на базе вышеупомянутого опытного образца разработали проект усовершенствованной РЛС с ФАР диаметром 144 см, состоящей из 6000 элементов. Расчетный вес такой решетки 77 кг, а стоимость 150 тыс. долларов. Фазовращатели решетки выдерживают мощность излучения более 2 Вт, поэтому американские специалисты считают, что такая РЛС могла бы обладать мощностью в импульсе 1,5 МВт, а этого вполне достаточно для самолетных станций любого класса. Для такой РЛС предполагалось использовать модифицированную ЭВМ, которая обеспечивает установку луча за 1,5 мкс.
Для перспективных истребителей-перехватчиков авиации ВМС США в 1969 году фирмой «Хьюз эркрафт» была разработана РЛС ESIRA (Electronically Scanned Interceptor Radar Antenna). Ее пассивная отражательная ФАР диаметром около 150 см состоит из 2400 элементов и четырехрупорного облучателя.
| Рис.3.. Внешний вид РЛС AN/APO-140 |
 |
| Рис. 4. Бортовая РЛС с щелевой полноводной ФАР, установленная в носовой части самолета F-I4 |
| Рис. 5. Основные блоки и ФАР обзорной навигационной РЛС RDR-1400 |
По заказу командования ВВС США американская фирма «Рейтеон» разработала РЛС AN/APQ-140, которая предназначалась для установки на сверхзвуковой стратегический бомбардировщик В-1, создаваемый фирмой «Боинг». Опытный образец этой РЛС с отражательной ФАР диаметром около 70 см, состоящей из 3800 элементов (рис. 3), прошел летные испытания на специальном самолете. Однако по ряду причин принятие этой РЛС на вооружение было отложено, и на первых этапах серийного производства самолета B-1 на него планируется устанавливать не одну многофункциональную РЛС, а комплект станций, представляющий собой усовершенствованный вариант комплекта РЛС самолета FB-111.
Зарубежная печать сообщает, что интенсивные работы по созданию самолетных РЛС с ФАР, проводимые в США со второй половины 60-х годов, не дали ожидаемых результатов. В связи с техническими трудностями, возникшими при реализации проектов, и недостаточно высокой надежностью твердотельных элементов ФАР современные американские боевые самолеты до сих пор не имеют бортовых РЛС с полным электронным управлением луча. Кроме того, существенное влияние на выполнение программ оказала высокая стоимость работ.
По данным иностранной печати, в США при создании многофункциональных РЛС применяется промежуточный конструктивный вариант ФАР, представляющий собой волноводную щелевую решетку с закрытой фидерной системой и питанием от общего высокочастотного генератора мощности. Как указывалось ранее, ограниченное электронное управление диаграммой направленности в такой антенне должно сочетаться с механическим сканированием ее решетки. Однако, несмотря на это, они имеют преимущества перед обычными антеннами. В частности, отмечается, что тщательная фазировка излучателей значительно уменьшает уровень боковых лепестков, а отсутствие вынесенного вперед облучателя или контррефлектора позволяет при данных размерах обтекателя увеличить диаметр антенны и ее предельные угловые отклонения, а следовательно, сузить диаграмму направленности и увеличить зону обзора. Кроме того, приближение центра тяжести антенной системы к узлам ее подвески позволяет значительно упростить их конструкцию и повысить скорость перемещения антенны.
В США уже разработаны РЛС нескольких типов с щелевыми антенными решетками. Например, на многоцелевых палубных истребителях F-14 «Томкэт» устанавливаются созданные фирмой «Хьюз эркрафт» РЛС системы управления оружием AN/AWG-9 (рис. 4). Сообщается, что сочетание в данной РЛС электронного и быстрого механического сканирования луча обеспечивает одновременное сопровождение нескольких воздушных целей. На базе этой станции фирма разработала серию РЛС «Атлас», которые планируется устанавливать на перспективных тактических самолетах. Антенну аналогичного типа (в виде щелевой волноводной решетки) применила фирма «Юнайтед эркрафт» в РЛС «Меркурий», которую предполагается использовать на перспективном истребителе ВВС США. Антенна РЛС «Меркурий», макет которой демонстрировался фирмой в конце 1974 года, представляет собой 30 горизонтальных отрезков волноводов со щелевыми излучателями, расположенными в узких стенках волноводов. Ее конструкция обеспечивает механическое сканирование по азимуту в пределах ±70° и электронное до 50° по углу места.
Американская печать отмечает, что благодаря своим преимуществам и относительно несложной конструкции щелевые волноводные антенные решетки найдут применение не только в многофункциональных, но и в более простых самолетных бортовых РЛС. В частности, фирма «Бендикс» разработала обзорную навигационную РЛС RDR-1400 (рис. 5), у которой антенная решетка обеспечивает только формирование луча, а обзор по обеим угловым координатам (азимуту и углу места) осуществляется за счет механического ее вращения. RDR-1400 имеет узкую диаграмму направленности и предназначена для обнаружения малоразмерных надводных целей. Ее намечается устанавливать на патрульные и поисково-спасательные самолеты и вертолеты.
Многие иностранные специалисты считают, что в течение ближайших лет наиболее вероятным типом антенны самолетных многофункциональных РЛС будет щелевая волноводная решетка с частичным механическим сканированием, а принятие на вооружение РЛС, имеющих полностью электронное управление луча, следует ожидать не ранее начала 80-х годов.
Зарубежное военное обозрение 1975 №10 С.51-56
pentagonus.ru
Антенна — радиолокационная станция — Большая Энциклопедия Нефти и Газа, статья, страница 1
Антенна — радиолокационная станция
Cтраница 1
Антенна радиолокационной станции ( радара) рассчитана на точные измерения высоты самолета и лишь на приемлемые по качеству измерения направления его полета в горизонтальной плоскости. Должно ли отношение высоты к ширине радарного отражателя быть меньше единицы, больше единицы или равным е-динице. [1]
Антенна радиолокационной станции должна иметь строго определенную диаграмму направленности. Конструкция антенны зависит от назначения станции и рабочего диапазона волн. В метровом диапазоне используют антенну типа волновой канал. Для получения узкой диаграммы направленности применяют многовибраторную антенну, которая состоит из большого числа вибраторов, расположенных в одной плоскости. На более коротких волнах — очень широко используют антенну с параболическим рефлектором. Облучателями такой антенны служат симметричный вибратор или рупор, которым заканчивается открытый конец волновода. Чтобы получить узкую диаграмму направленности, размеры параболического рефлектора берут достаточно большими. [2]
К антеннам радиолокационных станций предъявляют особые требования. Прежде всего, антенна должна иметь строго определенную диаграмму направленности. Как было показано в главе VII, диаграмма направленности является пространственной фигурой и в зависимости от типа антенны может иметь различную форму. [4]
К антеннам радиолокационных станций предъявляют особые требования. Прежде всего, антенна должна иметь строго определенную диаграмму направленности. Как было показано в § 27, диаграмма направленности является пространственной фигурой и в зависимости от типа антенны может иметь различную форму. [6]
Диаграмма направленности антенны радиолокационной станции перемещается по определенному закону. Этим законом определяется способ радиолокационного обзора пространства. Существуют различные способы обзора. [7]
На рис. 1.8 показана схема привода антенны радиолокационной станции в режиме кругового вращения с постоянной угловой скоростью. [8]
Потенциометрические дистанционные передачи широко используются в системах стабилизации угловых положений антенн радиолокационных станций летательных аппаратов и в ряде других устройств, где необходимо передать по электрической линии связи механическое угловое смещение одного элемента относительно другого. [10]
Для этого записывающий луч образует на мишени радиально-круговой или строчный растр синхронно со сканированием антенны радиолокационной станции. Считывающий луч развертывается, как в телевидении, с периодом кадра, равным периоду радиолокационного обзора. [11]
Для втого записывающий луч образует на мишени радиально-круговой или строчный растр синхронно со сканированием антенны радиолокационной станции. Считывающий луч развертывается, как в телевидении, с периодом кадра, равным периоду радиолокационного обзора. [12]
На практике уголковые отражатели устанавливаются таким образом, чтобы линия / совпадала с направлением а антенну радиолокационной станции. [14]
При преобразовании радиолокационного сигнала записывающий луч образует на мишени радиально-круговой или строчный растр синхронно со сканированием антенны радиолокационной станции. Считывающий луч развертывается, как в телевидении, с периодом кадра, равным периоду радиолокационного обзора. [15]
Страницы: 1 2 3
www.ngpedia.ru
Эли Брукнер Постоянно вращаюшаяся антенна радиолокатора, направляющая высокочастотные сигналы к линии горизонта с целью обнаружения удаленных объектов, является неотъемлемым элементом панорамы современного аэродрома. Однако во многих наиболее известных областях применения радиолокации, таких, как авиация, противовоздушная оборона и разведка, механически управляемое зеркало антенны начинает заменяться устройством нового типа. Расположенный в одной плоскости набор небольших идентичных антенн, каждая из которых способна передавать и принимать сигналы, заменяет вогнутый рефлектор. Луч, создаваемый этим набором антенн, перемещается, обозревая воздушное пространство, а сама антенная система остается неподвижной. Направление электромагнитного излучения, генерируемого радиолокатором, задается специальным электронным устройством, причем в основе управления лучом лежит использование явления интерференции электромагнитных волн. Это техническое новшество, используемое в радиолокационных системах, получило название фазированных антенных решеток. Основные принципы построения радиолокационных станций при этом остаются прежними. В основе работы всех радиолокационных станций лежит направленное излучение радиосигналов. Как правило, частота излучения лежит в микроволновом диапазоне, от 3 • 108 до 1010 Гц, хотя некоторые типы радиолокационных станций с очень большой дальностью действия работают в диапазоне высоких частот (ВЧ) и сверхвысоких частот (СВЧ), или соответственно в диапазонах от 3 • 106 до 3 • 107 Гц и от 3 • 107 до 3 • 108 Гц. В зависимости от формы антенна излучает узкий остронаправленный луч, пригодный для точного слежения за целью, или же широкий веерообразный луч, наиболее подходящий для обзора широких областей воздушного пространства. Когда посланный антенной сигнал достигает объекта, он отражается. Если мощность передаваемого импульса, чувствительность антенны и отражающая способность объекта достаточно велики, попадающий на антенну отраженный сигнал может быть зафиксирован радиолокационной станцией. В зависимости от типа радиолокатора и вида излучаемого импульса отраженный сигнал несет различную информацию о цели. Направление, с которого приходит отраженный сигнал, определяет местоположение объекта, и если радиолокационная станция излучает импульсы энергии, а не непрерывный сигнал, то по времени запаздывания между посылкой импульса и приемом отраженного сигнала можно судить и о расстоянии до объекта. В некоторых радиолокационных станциях предусмотрено измерение доплеров-ского смещения частоты отраженного сигнала (т.е. разности частот прямого и отраженного сигналов), которое имеет место, когда источник излучения (в данном случае цель) и приемник (радиолокатор) движутся относительно друг друга. По величине доплеровского смещения вычисляется скорость объекта в направлении к антенне или от нее. Для заданного расстояния до объекта интенсивность отраженного сигнала дает некоторое представление о размерах объекта. Слово «представление» используется здесь преднамеренно: два объекта одних и тех же размеров, если они имеют различную форму или же сделаны из различных материалов, будут посылать отраженные сигналы, существенно различающиеся по интенсивности. Чтобы получить более точную информацию о размерах объектов, некоторые радиолокационные станции передают такие короткие импульсы, что они физически короче целей, которые они могут встретить на пути своего распространения. Если радиолокационная станция излучает энергию только в течение нескольких миллиардных долей секунды, то к тому времени, когда передача импульса закончится, его фронт пройдет расстояние в пространстве порядка одного или нескольких метров. Такой импульс в пространстве имеет меньшую протяженность, чем, например, самолет. Радиосигналы отражаются как от дальних, так и от ближних поверхностей цели, и в случае чрезвычайно короткого импульса образуются два отраженных сигнала. Временной интервал между этими двумя отраженными сигналами соответствует длине цели. Поскольку радиолокатор обычного типа обозревает широкие области воздушного пространства, то он может собирать информацию о большом количестве объектов. Однако между последовательными моментами, когда одна и та же цель оказывается в поле зрения радиолокатора, неизбежно существует некоторый (иногда значительный) временной интервал. Скорость обновления информации о цели, т.е. частота, с которой одна и та же цель фиксируется радиолокатором, для большинства станций с вращающейся антенной не превышает скорости поворота зеркала антенны вокруг своей оси. В радиолокационных станциях систем управления воздушным движением, например, зеленая линия радиальной развертки, которая движется по экрану, оставляя на нем отметки, характеризующие новое местоположение самолета и несущие другую информацию о нем, поворачивается с той же скоростью, с какой вращается само зеркало антенны. Обновление информации о наблюдаемом объекте в таких радиолокационных станциях производится обычно через каждые шесть секунд, и даже в самых совершенных станциях военного назначения обновление информации редко производится чаще двух раз за одну секунду. Существуют обстоятельства, при которых новую информацию о положении и перемещении целей требуется получать более часто. Один радиолокатор с механически управляемой антенной может обеспечить непрерывное получение данных об одном или нескольких близко расположенных друг от друга объектах путем постоянного слежения за ними с помощью поворота антенной системы. Однако для решения многих боевых задач и задач разведки, как, например, слежение с военного корабля за несколькими ракетами, движущимися к нему с различных направлений, или внимательное наблюдение за полетом нескольких компонентов разделившейся боеголовки при проведении испытаний межконтинентальных баллистических ракет, каждая из большого количества целей должна наблюдаться непрерывно. До недавнего времени в таких случаях прибегали к использованию нескольких радиолокационных станций, каждая из которых предназначалась для слежения за одной или несколькими целями. С появлением радиолокационных станций с фазированной антенной решеткой необходимость использовать в подобных случаях несколько радиолокаторов с механически управляемыми антеннами отпала. Теперь их может заменить всего одна станция, оснащенная новой антенной системой. В качестве примера можно привести радиолокационную станцию с кодовым названием COBRA DANE, имеющую фазированную антенную решетку; она установлена на берегу Берингова моря и может следить одновременно за сотнями целей, рассредоточенных в пространстве, ограниченном 120° по азимуту и примерно 80° по углу места. В действительности радиолокационная станция наблюдает за этими целями одновременно путем автоматического перебрасывания своего луча с одной цели на другую за время, измеряемое микросекундами. Электронное управление лучом, благодаря которому достигаются такие замечательные возможности, основано на использовании простого физического явления. Когда расположенные рядом источники излучают энергию одновременно на одной и той же частоте, то исходящие из этих источников волны складываются. Это явление называется интерференцией. Характер взаимодействия двух волн от двух разнесенных в пространстве источников зависит от сдвига фаз между этими волнами. Если гребни и впадины одной волны соответственно совпадают с гребнями и впадинами другой волны (сдвиг фаз равен 0), то результирующее колебание будет иметь суммарную амплитуду. Если волны находятся не в фазе и их гребни и впадины не совпадают, то результирующий сигнал будет ослабленным или (при сдвиге фаз 180°) равным 0. Фазированная антенная решетка обычно собирается из расположенных в одной плоскости и на одинаковом расстоянии друг от друга излучающих элементов, к которым подводятся равные по амплитуде и совпадающие по фазе сигналы микроволнового диапазона. Задающий генератор генерирует сигнал, а транзисторы и специальные лампы, предназначенные для работы в микроволновом диапазоне, такие, как лампы бегущей волны, усиливают его. Если сигналы излучаются в фазе со всех элементов решетки, то их амплитуды складываются в определенных точках пространства вдоль линии, перпендикулярной к плоскости решетки. Следовательно, излучаемый сигнал будет сильным, а сигнал, отраженный от объектов, лежащих на пути его распространения вдоль оси, перпендикулярной плоскости антенной решетки и в пределах малого угла в стороны от нее, будет иметь достаточную для его обнаружения интенсивность. При больших углах отклонения от перпендикулярной оси антенной решетки сигналы от различных излучающих элементов должны проходить до цели неодинаковые расстояния. В результате соотношение их фаз меняется и они интерферируют, ослабляя или полностью уничтожая друг друга. Таким образом, за пределами узкого конуса, ось которого совпадает с перпендикулярной осью антенной решетки и в котором имеет место интерференция с усилением амплитуды результирующей волны, отраженные от объектов сигналы имеют малую интенсивность и обнаружить их не удается. Физические принципы, лежащие в основе формирования интерфе ренционных картин, позволяют определить ширину этого конуса. Она прямо пропорциональна рабочей длине волны излучения и обратно пропорциональна размеру антенной решетки. Если каждый элемент антенной решетки излучает сигналы в фазе с другими, то луч радиолокатора распространяется в направлении, строго перпендикулярном к плоскости решетки. Теперь предположим, что сигналы каждого излучающего элемента задерживаются на время, которое равномерно увеличивается от элемента к элементу вдоль плоскости решетки. При этом сигнал, излучаемый каждым элементом, будет отставать на часть длины волны от сигнала соседнего элемента. В результате все сигналы будут сдвинуты по фазе относительно друг друга. Теперь зона, в которой отдельные сигналы совпадают по фазе и, складываясь, дают сигнал суммарной амплитуды, с помощью которого можно обнаруживать цели, расположена не вдоль перпендикулярной оси решетки, а смещена в направлении увеличения задержки сигнала. Угол отклонения луча зависит от сдвига фаз сигналов, излучаемых соседними элементами антенной решетки, размера последней и длины волны. И в этом случае луч принимает форму узкого конуса, окруженного областями ослабляющей интерференции. Таким образом луч радиолокатора оказывается отклоненным без изменения положения антенны. Когда отраженный сигнал возвращается от цели, которая находится в этом новом направлении, определяемом нарастающим сдвигом фаз, цепь, обеспечивающая временную задержку передаваемого сигнала, вводит новую серию задержек отдельных сигналов, приходящих на каждый из излучающих элементов. Поскольку фронт возвращающейся волны достигает антенной решетки под углом к ее плоскости, элементы антенны, которые излучали сигнал последними (они расположены ближе к цели), принимают отраженный импульс первыми. Поэтому та же серия задержек, за счет которой создается заданная направленность излучения, обеспечивает поступление всех составляющих отраженного сигнала в приемное устройство в одной фазе, что дает возможность производить их обработку для получения информации о цели. Управление задержкой по фазе дает возможность отклонять луч антенной решетки обычного типа на угол до 60° от перпендикулярной оси, что обеспечивает поле обзора 120° по азимуту, т.е., сохраняя антенну неподвижной, радиолокатор обозревает третью часть круговой линии горизонта, а если плоскость решетки имеет достаточный наклон, то и от горизонта к зениту и далеко за него. Поскольку управление лучом при этом не связано ни с какими механическими перестройками, перемещение луча в пределах всей зоны обзора занимает всего несколько микросекунд. При использовании ЭВМ для расчета нужных сдвигов по фазе с целью отклонения луча на желаемый угол и для управления схемой задержки сигналов радиолокационная станция с фазированной антенной решеткой, такая, как COBRA DANE, может одновременно осуществлять слежение за несколькими сотнями целей. Электронное устройство, которое обеспечивает управление лучом радиолокатора и создает требуемую задержку микроволнового сигнала при подаче на каждый элемент антенной решетки, называется фазо- сдвигающим устройством. Оно состоит из отрезков кабеля или волновода очень точных размеров. Увеличение длины кабеля, по которому сигнал от генератора или усилителя подводится к излучающему элементу, приводит к задержке времени прохождения сигнала. На практике невозможно сделать так, чтобы длина всех кабелей, по которым сигналы подаются к излучающим элементам фазированной антенной решетки, менялась плавно, обеспечивая непрерывное изменение задержек по фазе. Поэтому сдвиг фазы производится скачками. Каждый элемент антенной решетки соединен с несколькими кабелями различной длины. Для получения фазовых сдвигов, обеспечивающих заданное отклонение луча, в каждую цепь включается определенная комбинация кабелей. В применяемой для разведывательных целей радиолокационной станции COBRA DANE, например, используются трехэлементные фазо-сдвигающие устройства. Каждое такое устройство имеет три полосковые линии различной длины, своего рода волноводы, которые обеспечивают передачу колебаний микроволнового диапазона вдоль узкой медной полоски, расположенной между двумя заземленными медными пластинами. Одна из полосковых линий увеличивает длину пути прохождения сигнала на величину, равную половине длины волны, около 15 см, так как рабочая частота радиолокационной станции COBRA DANE составляет примерно 1 ГГц. Это обеспечивает сдвиг фазы сигнала на 180° по отношению к незадержанному сигналу. Другая полос-ковая линия обеспечивает задержку сигнала на четверть длины волны, т.е. обеспечивает сдвиг фазы на 90°. Длина третьей полосковой линии такова, что в ней создается задержка, равная одной восьмой длины волны, что соответствует фазовому сдвигу 45°. В различных комбинациях эти три полосковые линии могут изменять фазу сигнала на любое число градусов, кратное 45, от 0 до 315°. Ступенчатое изменение величины фазовой задержки должно, вероятно, приводить к появлению мертвых зон. Каким же образом, используя восемь различных величин запаздывания по фазе с интервалом 45 °, можно обеспечить непрерывное перемещение луча радиолокатора? Ответ на этот вопрос заключается в свойствах картин интерференции. Всякий раз, когда разность фаз между сигналами, излучаемыми с противоположных сторон антенной решетки, достигает 360°, или одной длины волны, область интерференции, где формируется луч с суммарной амплитудой, будет сдвигаться в пространстве на расстояние, приблизительно равное собственной ее ширине. Поэтому, чтобы сместить луч, перпендикулярный плоскости антенной решетки (такое направление он имеет, когда все сигналы излучаются в фазе), в соседнее положение без образования между этими двумя положениями мертвой зоны, суммарный фазовый сдвиг вдоль плоскости антенной решетки должен составлять примерно 360°. Увеличиваются ли при этом фазовые сдвиги вдоль плоскости решетки непрерывно или ступенчато (через 45°) — не имеет значения. Ступенчатое изменение фазовых сдвигов приводит лишь к небольшому снижению мощности излучения и некоторой потере чувствительности антенной системы. Чтобы обеспечить более плавное перемещение луча антенной решетки с трехэлементными фазосдви-гающими устройствами, можно задать меньшую суммарную величину сдвига фазы, например, 180°, т.е. четыре раза по 45°. Если луч нужно отклонить от перпендикулярного направления на величину, большую, чем его ширина, суммарное изменение фазы вдоль плоскости антенной решетки должно превысить 360°. Из-за периодического характера электромагнитных колебаний фазовый сдвиг на кратное число длин волн эквивалентен 360°. Для суммарного изменения фазы более чем на 360° линейное увеличение задержки фазы от нуля до 360° должно повторяться несколько раз на всей плоскости антенной решетки. Первая серия задержек обеспечивает суммарный сдвиг фазы на одну длину волны, вторая серия увеличивает его до двух длин волн и т.д. Графически изменение величины фазовой задержки вдоль плоскости антенной решетки представляется в виде зубьев пилы: чем круче их скосы и чем больше их количество, тем резче отклоняется луч. Из простых геометрических правил следует, что с увеличением отклонения луча от перпендикулярного направления эффективная площадь антенны уменьшается. В результате чувствительность фазированной антенной решетки к отраженным от цели сигналам быстро падает при углах отклонения луча от перпендикулярной оси более чем на 60°. Поэтому одна фазированная антенная решетка не может обеспечить такую же возможность обзора во всех направлениях, как механически поворачиваемые антенны. Одним из решений этой проблемы является использование нескольких антенных решеток, обращенных своими плоскостями в разные стороны. Другим способом расширения зоны обзора фазированной антенной решетки является расположение ее в горизонтальной плоскости под куполообразной линзой, которая отражает излучение, и за счет этого угол отклонения луча радиолокационной станции увеличивается. Когда антенная решетка формирует луч под углом 60° к зениту, использование линзы может обеспечить еще большее его отклонение, вплоть до 90° к зениту, т.е. в направлении на горизонт. Таким образом линза позволяет осматривать с помощью антенной решетки всю полусферу воздушного пространства. Линза может быть выполнена из специальной керамики или пластмассы, которая отражает излучение микроволнового диапазона. Она может также выполнять роль фазосдвигающих устройств второй ступени, чтобы дополнительно задерживать фазу сигнала, излучаемого антенной решеткой. Когда управление фазой используется для посылки короткого импульса под большим углом к перпендикулярной оси антенной решетки, излучаемый импульс неизбежно будет искажаться — растягиваться во времени и пространстве. Предположим, что антенна излучает импульс длительностью 5 не. Если излучение радиолокационной станции направлено строго перпендикулярно к плоскости антенной решетки, то импульс имеет в пространстве прямоугольное продольное сечение; его ширина равна ширине антенной решетки, а длина — расстоянию, которое электромагнитная волна проходит за 5 не, т.е. 1,5 м. Если, с другой стороны, за счет сдвига фаз луч значительно отклоняется от перпендикулярной оси, то продольное сечение импульса будет иметь форму параллелограмма. По отношению к цели длина импульса окажется больше 1,5 м, поскольку сигналы, излучаемые отдельными элементами антенной решетки, достигают цели не одновременно, а последовательно. Отраженный импульс, который возвращается к антенной решетке, также будет растянутым. Для обнаружения целей и слежения за ними обычно используются импульсы намного большей длительности, например 1000 нc, и искажение в пределах нескольких наносекунд имеет малое значение. Растягивание импульса в свою очередь мало влияет на способность радиолокационной станции определять по характеру отраженного сигнала местоположение и скорость цели. Для раздельного наблюдения целей, движущихся в тесном строю, однако, требуется излучать короткие импульсы. Они же необходимы для определения размеров цели по сигналам, отраженным от ее передней и задней поверхностей. Если передаваемый короткий импульс растягивается, то отраженные сигналы уже не приходят раздельно, а сливаются, что затрудняет получение требуемой информации. Метод, подобный тому, который используется для управления лучом с помощью сдвига фаз сигналов, помогает и в этом случае; он позволяет сохранять форму импульса. Для обеспечения требуемого сдвига фаз необходимо производить задержки сигналовтолько на время, соответствующее частям длины волны. Задержки же, которые необходимы, чтобы избежать растягивания импульса, эквивалентны целому числу длин волн. При этом излучение сигналов отдельными элементами антенной решетки производится последовательно, причем опережение в излучении каждого сигнала по отношению к следующему пропорционально расстоянию, которое сигнал должен пройти до цели. В результате достигается тот же эффект, как если бы антенная решетка поворачивалась, удерживая цель в направлении перпендикулярной оси. Этот метод известен как управление лучом с помощью временных задержек. Подобно методу, в котором используется увеличение фазовых задержек, он дает возможность посылать в заданном направлении сигнал когерентного и поэтому мощного излучения. Такие большие задержки, эквивалентные расстоянию в несколько метров, которое проходит сигнал, требуют включения отрезков кабеля соответствующей длины в цепь прохождения сигнала от генератора или усилителя до излучающего элемента. Большая фазированная антенная решетка может включать в себя много тысяч излучающих элементов, и если бы каждый имел свою цепь временной задержки, то радиолокационная установка была бы чрезвычайно сложной и дорогой. Поэтому конструкторы радиолокационных станций стремятся изыскать компромиссное решение, при котором одновременно достигались бы и нужная форма импульса, даже при больших углах отклонения направления излучения от перпендикулярной оси антенной решетки, и конструктивная простота. В результате в современных радиолокаторах с фазированными антенными решетками управление лучом осуществляется как с помощью сдвига фаз, так и с помощью временных задержек. В радиолокационной станции COBRA DANE, например, каждый из 15 360 излучающих элементов связан с отдельным трехэлементным фазосдвигающим устройством, поэтому сдвиг фазы каждого сигнала производится отдельно. В режиме обнаружения целей радиолокационная станция излучает импульсы длительностью 1000 нc, и луч управляется только посредством введения фазовых задержек. Поскольку назначение радиолокационной станции состоит в слежении за баллистическими ракетами, она должна обеспечивать получение информации об их размерах после обнаружения. С этой целью антенная решетка разделена на 96 участков, каждый из которых включает 160 излучающих элементов. После того как цель обнаружена, станция начинает излучать импульсы очень малой длительности, и сигналы, подводимые к каждому участку антенной решетки, предварительно проходят по цепи временной задержки. Эти цепи аналогичны фазосдвигающим устройствам, но значительно больше по размеру. Они состоят из набора коаксиальных кабелей различной длины, и любая их комбинация может быть включена в цепь для создания временных задержек, соответствующих прохождению сигнала на расстояние от одной до 64 длин волн, или около 19,2 м, так как рабочая частота радиолокационной станции COBRA DANE равна примерно 1 ГГц. Поскольку поперечный размер отдельных участков антенной решетки составляет около 2,7 м, что мало по сравнению с ее диаметром, равным 29 м, то искажения, которые возникают в каждом участке решетки при больших углах отклонения луча от перпендикулярной оси, лежат в допустимых пределах. Каждый участок антенной решетки излучает сигнал, занимающий в пространстве объем, продольное сечение которого имеет форму параллелограмма. За счет временных задержек эти сигналы суммируются так, что искажения отдельных сигналов не складываются. В результате форма импульса сохраняется достаточно хорошо, а устройств, обеспечивающих временные задержки сигналов, при этом используется только 96, а не 15 360. Что касается расхода материалов, то обеспечение управления лучом радиолокационной станции COBRA DANE путем введения временных задержек потребовало дополнительного использования кабелей общей длиной чуть больше 1500 м. Если бы не применялось разделение антенной решетки на отдельные участки, то дополнительно потребовалось бы 165 км кабеля. Замена подвижной антенны набором неподвижных излучающих элементов помимо возможности электронного управления лучом может дать и другие преимущества. Одним из этих преимуществ является обеспечение высокой надежности в работе. Работа неподвижной антенной решетки не зависит от состояния таких изнашиваемых механических компонентов, как подшипники и двигатели. Кроме того, в большинстве радиолокационных станций с механическим управлением антенной используется одна или несколько очень больших электронных ламп для усиления сигналов микроволнового диапазона. В качестве примера можно привести радиолокационную станцию Marconi Martello, изготовленную в Великобритании и предназначенную для использования в системе противовоздушной обороны. Основным схемным элементом в этой станции является электронная лампа с выходной мощностью около 3 МВт. В случае ее отказа вся система выходит из строя. Правда, в таких радиолокационных станциях, предназначенных для работы в системах разведки и противовоздушной обороны, всегда предусматривается возможность быстрого переключения на вспомогательные источники энергии микроволнового излучения. В противоположность этому в радиолокационной станции COBRA DANE излучаемая энергия генерируется 96 лампами, каждая мощностью 160 кВт. Выходной сигнал с каждой лампы поступает на делитель, а затем на 160 излучающих элементов, составляющих один участок антенной решетки. Отказ одной лампы в данном случае приводит к выходу из строя только одной из 96 частей антенной решетки, и радиолокационная станция в целом остается работоспособной, хотя качество ее работы несколько ухудшается. Более того, лампы меньшего размера в случае отказа заменять легче, чем одну большую лампу, используемую в радиолокационной станции Martello. Радиолокаторы с фазированными антенными решетками со схемой на полупроводниковых элементах имеют еще более высокий уровень надежности и легкости в эксплуатации. Транзисторные схемы генераторов и усилителей используются, например, в радиолокационных станциях с кодовым названием PAVE PAWS, предназначенных для обнаружения баллистических ракет, запускаемых с кораблей и подводных лодок (такие станции уже установлены на п-ве Кэйп-Код и в штате Калифорния, и их размещение планируется в штатах Джорджия и Техас). В отдельных модулях смонтировано по четыре параллельно включенных транзистора мощностью по 100 Вт. Каждый модуль обеспечивает возбуждение одного излучающего элемента. Таким образом, сигналы, подводимые к каждой из двух поверхностей сдвоенной антенны, усиливаются одновременно 1792 модулями в цепи антенных элементов, а не 96 лампами, так что отказ в работе одного элемента еще меньше влияет на характеристики радиолокационной станции в целом. К тому же среднее время между двумя отказами для одного полупроводникового модуля значительно больше, чем для лампы, используемой в радиолокационной станции COBRA DANE. В первом случае этот показатель равен 100 000 ч, во втором — 20 000 ч. При отказе модулей, имеющих длину 30 см и работающих от источника напряжения 28 В, заменять их намного легче, чем лампы в радиолокационной станции COBRA DANE, имеющие длину 1,5 м и работающие под напряжением 40 000 В. В радиолокационной станции PAVE PAWS, как и во многих других, построенных на полупроводниковых элементах, усиление сигналов производится после того, как они будут распределены по антенным элементам и сдвинуты по фазе. Поэтому потери мощности, которые имеют место при прохождении усиленного сигнала через делитель и цепи фазосдви-гающего устройства, исключаются. Однако наряду с этим выигрышем в эффективности и всеми другими преимуществами полупроводниковая технология имеет и недостаток. Она в общем обеспечивает меньшие значения пиковых мощностей по сравнению с теми, какие можно получить с помощью электронных ламп. Оограничения, связанные с возможностью получения в радиолокаторах на полупроводниковых элементах сигналов большой мощности, повысили важность так называемого метода кодирования и сжатия импульсов, с помощью которого можно имитировать короткие импульсы большой мощности при излучении менее мощных и больших по длительности сигналов. Этот прием не утрачивает своей важности и в случае использования мощных радиолокационных станций на электронных лампах как с механически управляемыми антеннами, так и с фазированными антенными решетками, когда требуется получить определенную информацию об удаленных объектах. Дальность, на которой радиолокационная станция с заданной чувстри-тельностью приемного тракта может обнаруживать объекты определенного размера и с определенной отражательной способностью, зависит от общей энергии импульса. Чем короче импульс, тем выше должна быть пиковая мощность излучения при заданной дальности действия. Радиолокационная станция COBRA DANE может обнаруживать металлические объекты величиной с грейпфрут на расстоянии около 2000 км. Для этого при длительности импульса 5 нc пиковая мощность излучения должна быть не меньше 3 • 1012 Вт, что более чем достаточно для разрушения всех цепей радиолокационной станции. И все же определить размеры объекта или же раздельно наблюдать ряд объектов, летящих на близком расстоянии друг от друга, можно только с помощью импульсов малой длительности. То, что дальность действия радиолокационной станции определяется не пиковой мощностью, а общей энергией импульса, помогает найти решение. Оно заключается в следующем. Когда радиолокатор работает в режиме передачи, излучаемый импульс растягивается и соответственно снижается пиковая мощность. Этот прием называется кодированием импульса. В режиме приема производится сжатие отраженного сигнала с целью извлечения из него всей информации, которая могла бы быть получена при передаче действительно короткого импульса. В радиолокационной станции COBRA DANE, например, импульс длительностью 5 нc перед тем, как он усиливается и излучается, растягивается в 200 тысяч раз и его длительность становится равной 1 мс. Требуемая пиковая мощность снижается в такое же число раз — с 3 • 1012 Вт до 15 МВт, фактической мощности излучения COBRA DANE. При обычной технике кодирования импульс длительностью 5 нс, включающий в себя спектр частот, проходит через дисперсионную линию задержки, которая вызывает различное запаздывание отдельных составляющих этого спектра: чем выше частота составляющей, тем больше задержка; составляющая сигнала с самой низкой частотой излучается без задержки, в то время как составляющая с самой высокой частотой получает максимальную задержку, равную 1 мс. После этого импульс, имеющий уже длительность 1 мс, усиливается и излучается; принимаемый отраженный сигнал имеет ту же длительность. Принятый сигнал пропускается через цепь сжатия, которая вводит ряд дополнительных задержек. На этот раз длительность задержек связана с частотой обратным образом. Составляющая спектра импульса с самой низкой частотой получает задержку, равную 1 мс, а составляющая с самой высокой частотой не получает никакой задержки. Таким образом, в процессе выполнения операции кодирования и сжатия импульса каждая из составляющих спектра сигнала получает одну и ту же суммарную задержку. В результате отраженный сигнал получается неискаженным, имеющим длительность 5 нc. Если излученный импульс длительностью 1 мс, который в пространстве имеет длину, равную 300 км, при рас пространении встречает объект, который значительно короче его, то импульс возвращается обратно в виде двух, перекрывающих друг друга отраженных сигналов. Обычным способом такие отраженные сигналы разделить нельзя и по их относительному положению определить размеры объекта невозможно. Однако когда кодированные, перекрывающие друг друга отраженные сигналы сжимаются, на выходе получаются два различных сигнала длительностью 5 нc. Кодирование и сжатие импульсов выполняют ту же роль и в радиолокационных станциях, построенных на полупроводниковых элементах. Даже когда нет необходимости определять размер объекта, от которого отражается сигнал, точное определение расстояния до объекта требует применения довольно коротких импульсов. Если не использовать сжатие, то с помощью импульсов длительностью 1 мс можно определить расстояние до объекта с точностью только до 150 км. Кроме того, при излучении длинных импульсов сказывается воздействие местных помех, обусловленных отражением от выпадающих осадков и от земли. В то же время полупроводниковая техника не может обеспечить получение таких мощностей, которые необходимы при работе короткими импульсами, чтобы дальность действия радиолокатора была такой же, как и при излучении импульсов большой длительности. Поэтому, чтобы при низкой мощности излучения получить большую дальность действия и высокую разрешающую способность, в радиолокаторах на полупроводниковых элементах необходимо применять кодирование и сжатие импульсов. Первые радиолокационные станции с фазированными антенными решетками, которые начали использоваться в 60-70-е годы, были предназначены для военных и разведывательных целей. Существуют обстоятельства, при которых гражданские отрасли экономики диктуют потребности, стимулирующие развитие военной техники. В частности, гражданская авиация нуждается в получении данных о быстро перемещающихся объектах в зоне аэродрома, где прибывающие самолеты выравнивают свой курс для захода на посадку. Радиолокационные станции, контролирующие подход самолетов к полосе, направляют их на посадку, одновременно следя за дальностью самолетов и их положением относительно взлетно-посадочной полосы. Возрастающая интенсивность воздушного движения создает все большую потребность в оснащении гражданской авиации радиолокаторами с фазированными антенными решетками. С уменьшением количества излучающих элементов стоимость фазированной антенной решетки снижается. В большинстве областей применения радиолокационной техники антенные системы должны иметь большое количество излучающих элементов. Маленькая антенная решетка имеет менее сфокусированный и, следовательно, более широкий луч. Это снижает ее разрешающую способность по угловым координатам, а малая площадь не может обеспечить высокую чувствительность к отраженным сигналам. Когда не требуется обозревать большую область воздушного пространства, оба этих недостатка антенной решетки малого размера могут быть преодолены путем объединения ее с большим рефлектором. Поле обзора радиолокационной станции управления заходом на посадку самолетов не должно быть большим. Обычно такая радиолокационная станция должна просматривать пространство в пределах около 10° по азимуту и от 7 до 14° по углу места. Поэтому для этих целей можно использовать гибридную систему, состоящую из фазированной антенной решетки и традиционного рефлектора. В одной из конструкций радиолокатора используется антенная решетка с 443 излучающими элементами, которая работает совместно с отражателем, имеющим размеры 3,96×4,57 м. Решетка располагается вблизи фокуса рефлектора, который отражает луч при любом угле излучения антенной решетки. В данном случае рефлектор действует как линза, фокусируя луч и снижая его боковое рассеяние. Отраженные лучи становятся уже и вписываются в более узкий угол в пространстве. В результате улучшается способность решетки разрешать две цели в пределах малого угла и определять точный азимут одиночной цели. Рефлектор также увеличивает чувствительность к отраженному сигналу. В будущем в радиолокации найдут применение новые достижения в области схемотехники. Использование в радиолокационной технике элементной базы, подобной цифровым интегральным микросхемам, применяемым в вычислительной технике, значительно снизит количество и размер компонентов, необходимых для генерирования, приема и обработки сигналов. Новые элементы на арсенид-галлиевых кристаллах, известные как монолитные микроволновые интегральные микросхемы, объединяют в себе фазосдвигающие устройства, переключатели и транзисторные усилители. Приемопередающий модуль, содержащий все цепи, необходимые для создания одного излучающего элемента фазированной антенной решетки, уже сейчас может быть полностью собран только на 11 таких микросхемах. А пока для построения приемо-передающих модулей на полупроводниковых элементах требуются сотни деталей. Развитие электроники со временем позволит вкл |
www.airbase.ru
способ и устройство стабилизации диаграммы направленности антенны судовой рлс — патент РФ 2130219
Изобретение относится к радиолокации, в частности к антенным устройствам судовых РЛС. Достигаемый технический результат — стабилизация диаграммы направленности (ДН) антенны в условиях качки, что достигается поочередным использованием для излучения и приема нескольких облучателей зеркальной антенны, расположенных в фокусе ее отражателя и по обе стороны от него, смещенных в вертикальной плоскости относительно друг друга на углы, не меньшие половины ширины ДН. Устройство, реализующее способ, включает в свой состав, кроме отражателя и облучателей, СВЧ-переключатель, управляемый физическим маятником, состоящим из отвеса и груза. 2 с.п. ф-лы, 3 ил., 3 табл. Изобретение относится к области морской радиолокационной техники, в частности к зеркальным антенным устройствам судовых радиолокационных станций. Судовые РЛС предназначены для обеспечения безопасности судовождения в любое время года, суток, в условиях темного времени суток, в тумане и в других сложных условиях мореплавания. На судах морского флота в указанных условиях, а также в условиях хорошей видимости при плавании вблизи берегов, судовые РЛС работают практически непрерывно, обеспечивая отображение на экране станции внешней надводной обстановки. Характеристики судовых РЛС в значительной степени определяются конструкцией и тактико-техническими данными их антенных устройств. К основным характеристикам антенных устройств относятся диаграммы направленности антенны в горизонтальной и вертикальной плоскостях; коэффициент усиления антенны; уровень боковых лепестков; частота вращения антенны. Диаграмма направленности антенны РСЛ в горизонтальной плоскости характеризует точность определения направления на обнаруженную цель. Для СНРЛС характерными величинами диаграммы направленности по половинной мощности являются 0,8 + 2,2 гр. Диаграмма направленности антенны в вертикальной плоскости определяет возможность обнаружения надводных целей в условиях качки судна. Характерными величинами для современных станций являются диаграммы направленности величиной 20 + 30 гр., обеспечивающие нормальную работоспособность станций при углах крена до 10 + 15 гр. Коэффициент усиления антенны определяет эффективность судовых РЛС по обнаружению различных целей. Уровень боковых лепестков характеризует судовые РЛС с точки зрения возможности получения на экране индикатора станции ложных целей. Уровень боковых лепестков у антенн современных судовых РЛС ниже уровня основной диаграммы на 20 + 30 дБ. Частота вращения антенны измеряется числом оборотов в минуту и для современных станций равна 14 + 30 об/мин. В судовых РЛС в настоящее время наибольшее распространение находят волноводно-щелевые и зеркальные антенны РЛС. В качестве прототипа предлагаемого антенного поста выбираем антенный пост с зеркальной антенной. Антенный пост прототипа, как и антенные посты существующих РЛС, обладают одним существенным недостатком, заключающимся в отсутствии стабилизации диаграммы направленности антенны в вертикальной плоскости. Анализ функционирования судовых РЛС на качке судна показывает, что во время качки станция с нестабилизированным антенным постом будет иметь значительно меньшую дальность обнаружения надводных целей, а при углах качки, близких к максимальным, вообще будут наблюдаться пропуски в обнаружении целей. Для количественной оценки величины потерь в обнаружении целей рассмотрим условия функционирования РЛС на судах при наличии качки. Для существующих судовых РЛС с нестабилизированным антенным постом условия обнаружения надводных целей будут зависеть от углов качки судна и формы диаграммы направленности (ДН) антенны в вертикальной плоскости. Известно [К. В. Голев. Расчет дальности действия радиолокационных станций. Москва. 1962 г.], что дальность действия РЛС в освещенной зоне — D можно определить из выражениягде Cm — энергетическая характеристика СНРЛС в максимуме ДН антенны РЛС;
s — эффективная площадь рассеяния цели;
& — отношение энергии принимаемого сигнала к энергии шумов;
F[fг, fв] — характеристика направленности антенны РЛС по напряженности поля;
fг, fв — углы смещения ДН антенны от оси в горизонтальной и вертикальной плоскости соответственно;
V — множитель ослабления радиоволн в приводном слое. На расстояниях, меньших 30% дальности радиогоризонта, когда кривизной земной поверхности можно пренебречь, с учетом малых величин разности фаз прямого и отраженного от поверхности моря сигналов в районе цели, получим
где h[1] , h[2] — высоты антенны СНРЛС и эффективного центра отражения цели;
L — длина волны. Анализ приведенных выражений показывает, что изменение дальности действия судовых РЛС, при прочих равных условиях, прямо пропорционально изменению величины диаграммы направленности антенны судовой РЛС по напряженности поля, а изменение дальности действия из-за изменения множителя ослабления за счет колебаний величин высот антенны и цели, а также за счет этого дальности из-за качки судна и цели при волнении моря незначительны. Для получения количественной оценки изменения дальности обнаружения надводных целей судовой РЛС на качке зададимся диаграммой направленности антенны по напряженности в виде [Справочник по радиолокации. Под ред. М. Сколника. М. Сов. радио. 1976 г.]:
где Cm — максимальный коэффициент усиления антенны по мощности;
KC — коэффициент сужения ДН по отношению к ДН полуволнового вибратора. Для расчетов относительного изменения дальности действия судовой РЛС на качке в направлении бортовых курсовых углов используем выражение:
где Dm — максимальная дальность обнаружения цели при отсутствии качки;
n — номер вычисления значения D/Dm;
nm — общее число суммируемых результатов вычислений;
KC = 60/Qв-, где Qв — ширина ДН антенны по мощности в вертикальной плоскости. Результаты выполненных на ПЭВМ расчетов средних за период качки величин относительной дальности (в числителе) и величин относительной дальности при максимальных углах крена (в знаменателе) для различных значений максимальных углов крена судна и величин диаграмм направленности антенны в вертикальной плоскости представлены в таблице 1. Расчеты проводились при nm = 50. Анализ результатов расчетов показывает, что во время качки судна судовая РЛС с нестабилизированным антенным постом будет иметь значительно меньшую дальность обнаружения надводных целей, а при углах качки, близких к максимальным, вообще будут наблюдаться пропуски в обнаружении целей. Использованию в судовых РЛС существующих стабилизированных антенных постов РЛС управления оружием и обнаружения воздушных целей препятствует их сложность, необходимость установки на судне датчика углов качки и, как следствие этого, значительное повышение сложности и стоимости судовых РЛС. Сущность изобретения заключается в том, что с целью стабилизации диаграммы направленности (ДН) антенны судовой РЛС, состоящей из зеркального отражателя и облучателя, в вертикальной плоскости во время качки судна и повышения тем самым надежности обнаружения целей в морских условиях, а также обеспечения возможности уменьшения ширины ДН стабилизированной антенны для повышения энергетического потенциала и дальности действия РЛС или для снижения излучаемой и потребляемой от сети мощности при неизменной дальности действия и повышения экологической чистоты РЛС, сканируют луч ДН антенны в вертикальной плоскости, обеспечивая сохранение на качке заданного направления ДН, путем поочередного использования для излучения и приема радиоволн нескольких облучателей антенны, расположенных в фокусе отражателя и по обе стороны от него, смещенных в вертикальной плоскости относительно друг друга на углы не менее половины ширины ДН; производят последовательное подключение соседних облучателей к СВЧ тракту РСЛ; управляют таким последовательным подключением к СВЧ тракту РЛС различных облучателей без затраты энергии за счет использования свойств физического маятника и сил земного притяжения. С целью реализации указанного выше способа стабилизации ДН антенны в вертикальной плоскости в состав антенного поста судовой РЛС, включающего зеркальный отражатель и облучатель, дополнительно включены несколько дополнительных облучателей, расположенных по вертикали вверх и вниз от основного на одинаковых с основным облучателем расстояниях от центра зеркального отражателя; СВЧ переключатель, обеспечивающий последовательное подключение к СВЧ тракту указанных дополнительных облучателей за счет углового перемещения переключающего элемента T среднего положения, при котором подсоединен основной облучатель, вверх или вниз, в зависимости от направления и величины угла крена; физический маятник из отвеса и груза, жестко соединенный отвесом с горизонтальной осью СВЧ переключателя и обеспечивающий, под действием силы земного притяжения, зависимое от качки судна последовательное подключение СВЧ тракта РЛС к соответствующему дополнительному облучателю антенны для смещения луча ДН антенны на имеющий место в данный момент угол крена в противоположную крену сторону и обеспечения тем самым неизменным, т. е. стабилизированным, положения ДН антенны в вертикальной плоскости. Фиг. 1. Схема конструкции антенного поста в исходном положении. Вид сбоку. Фиг. 2. Схема конструкции антенного поста при крене в сторону излучения. Вид сбоку. Фиг. 3. Схема конструкции антенного поста при крене в сторону, обратную направлению излучения. Вид сбоку. Возможность стабилизации ДН зеркальной антенны основано на использовании известного способа сканирования ДН путем смещения облучателя зеркальной антенны из фокуса зеркального отражателя. Такой способ изменения положения оси ДН широко используется в радиолокации. На этом принципе основан, например, обзор пространства по высоте в высотомерах, в которых сканирование луча антенны по высоте осуществляется путем качания зеркального отражателя антенны в вертикальной плоскости относительно неподвижного облучателя антенны. На этом же принципе основан обзор участка поверхности моря или суши в РЛС управления стрельбой за счет быстрого перемещения луча антенны в заданном секторе обзора по азимуту и воспроизведения на экране индикатора типа B просматриваемого участка поверхности. О возможных максимальных углах сканирования луча зеркальных антенн указывается в литературе (см. Справочник по радиолокации под редакцией М. Сколник. Сов. радио. М. 1973 г. т. 2, стр. 109 — 117). Отмечается, что антенна со сферическим зеркалом обеспечивает сканирование луча ДН антенны без значительных искажений в пределах угла 140 градусов. Антенна с отражателем в виде параболического тора обеспечивает качание луча ДН антенны в угле до 120 градусов. В отечественной литературе (см. например В.М. Гинсбург, И.Н. Белова. Расчет параболических антенн. Сов. радио. 1959 г.) изложена методика расчета ДН зеркальных антенн как при расположении облучателя в фокусе отражателя, так и при выносе облучателя с качанием луча ДН антенны в секторе до 10 и более градусов. Здесь же отмечается, что при отклонении луча антенны на углы больше 10 гр. будут наблюдаться искажения формы ДН антенны. Для устранения этого приведены результаты расчетов ДН с корректурой ее формы при отклонении луча антенны на большие углы качания. Для обеспечения стабилизации луча ДН судовой антенны необходимо качание луча в пределах характерных для морских судов максимальных углов крена, которые лежат в пределах 30 — 40 градусов. Из изложенного следует, что практическое использование зеркальных антенн для стабилизации ДН антенны судовых РЛС на качке судна путем отклонения луча ДН антенны за счет перемещения облучателя, широко используемого в радиолокации, вполне осуществимо. При этом необходимо учесть, что нет необходимости предъявлять жесткие требования к сохранению неизменной формы ДН антенны при качании луча в вертикальной плоскости, т.к. функции по измерению пеленга на цель несет ДН антенны в горизонтальной плоскости, искажения которой при качании ДН в вертикальной плоскости незначительны. Принципиальная схема конструкции антенного поста судовой РЛС, реализующего предлагаемый способ, в исходном положении, при нахождении судна на ровном киле, представлена на фиг. 1. Антенный пост состоит из основания антенны 1 и укрепленных на нем двух боковых стоек 2, в верхней части которых укреплен зеркальный отражатель антенны 3. В геометрическом центре отражателя укреплен кронштейн облучателей 4 с СВЧ трактом. В фокусе зеркального отражателя расположен основной облучатель 5. Выше и ниже основного облучателя, на том же расстоянии, что и основной облучатель, размещены верхний — 6 и нижний — 7 дополнительные облучатели. Указанные три облучателя соединены между собой и с кронштейном 4 корпусом СВЧ переключателя 8, ось которого расположена горизонтально. На оси СВЧ переключателя 8 сбоку жестко укреплен маятник 9 с отвесом и грузом. В исходном положении, при отсутствии качки и нахождении судна на ровном киле, энергия радиоволн при излучении и приеме сигналов подводится по СВЧ тракту, расположенному в кронштейне 4, и через СВЧ переключатель 8 соединяется с основным облучателем 5. При этом, при излучении радиоволн происходит облучение зеркального отражателя 3 и излучение радиоволн в пространство. Антенное устройство формирует в дальней зоне заданную ДН с осью, расположенной в горизонтальной плоскости параллельно земной поверхности, для РЛС обнаружения надводных целей, с фронтом радиоволн антенны в дальней зоне — 11. При приеме радиоволн приходящая отраженная целями энергия фокусируется зеркальным отражателем 3 в фокусе отражателя — в месте расположения основного облучателя 5 и через облучатель 5 и СВЧ переключатель 8 поступает в СВЧ тракт РЛС. Таким образом обеспечивается функционирование антенного поста РЛС при отсутствии качки. Рассмотрим процесс функционирования антенного поста во время качки судна. При крене судна с антенной РЛС в сторону излучения на угол 10 (фиг. 2) маятник 9 сохранит вертикальное положение своего отвеса, жестко соединенного с переключающим элементом СВЧ переключателя 8, который обеспечит соединение СВЧ тракта РЛС с нижним дополнительным облучателем 7, смещенным по отношению к оси зеркального отражателя на угол 10. Такое смещение облучателя вызовет смещение оси ДН антенны вверх также на угол 10, обеспечивая сохранение горизонтального положения оси ДН антенны в вертикальной плоскости неизменным. Аналогичным образом будет обеспечиваться стабилизация ДН антенны и при крене судна в сторону, обратную направлению излучения (фиг. 3). В промежуточных положениях наклона антенны СВЧ переключатель будет соединять СВЧ тракт РЛС с двумя соседними облучателями, обеспечивая работу РЛС при промежуточных углах качки. Используя набор из групп дополнительных облучателей сверху и снизу основного облучателя (как показано на фиг. 1 пунктиром), можно обеспечить плавное переключение соседних положений ДН антенны во время качки судна без значительных искажений ДН антенны. При вращении антенны в горизонтальной плоскости антенна и ее ось ДН в горизонтальной плоскости будут занимать по отношению к диаметральной плоскости (курсу) судна различные направления. При направлении ДН антенны вдоль диаметральной плоскости судна назад или вперед величина наклона антенны от килевой качки и боковой наклон антенны от бортовой качки не будут влиять на положение ДН антенны в вертикальной плоскости. Условия наблюдения целей для РЛС сохранятся неизменными. По мере поворота антенны в сторону борта (курсового угла 90 гр.) составляющая крена будет возрастать. По мере возрастания крена антенного поста, подвижная система антенного поста будет постоянно сохранять первоначальное положение физического маятника в вертикальной плоскости, обеспечивая сохранение заданного положения оси ДН антенны в вертикальной плоскости. Изложенное подтверждает возможность технического осуществления предлагаемого устройства. Внедрение предлагаемого устройства обеспечит получение целого ряда преимуществ. При использовании предлагаемого антенного поста практически исключаются какие-либо изменения дальности обнаружения целей на качке. Для подтверждения возможности стабилизации антенны по предложенному способу рассмотрим закономерности движения подвижной части конструкции, представляющей собой физический маятник, на качке судна. Закономерности качания физического маятника широко используются для стабилизации в пространстве картушки судовых магнитных компасов. Массивный свинцовый поддон корпуса картушки обеспечивает сохранение верхней плоскостью картушки, установленной на карданном подвесе, строго горизонтального положения. Для своевременной отработки корпусом картушки, являющимся в рассматриваемом случае физическим маятником, углов качки судна период ее собственных колебаний должен быть значительно меньше периода качки судна. Физическим маятником является абсолютно твердое тело, совершающее под действием силы тяжести колебания вокруг горизонтальной оси, проходящей через его центр тяжести [Справочник по физике. Яворский Б.М., Детлаф А.А. Наука. М. 1978 г.]. Период колебаний физического маятника определяется соотношением
где J — момент инерции тела относительно оси качания;
m — масса физического маятника;
d — длина физического маятника;
g — ускорение силы тяжести. Если мы рассматриваем качание тела сложной формы, состоящего из n отдельных составляющих, момент инерции такого тела относительно оси качания — J определяется как сумма произведений масс всех составляющих частей тела на квадраты их расстояний от той же оси r[i].
Аналогично для суммарной величины md такого тела справедливо равенство
Используем полученные выражения для определения периода колебаний качающихся деталей предлагаемой конструкции антенного поста судовой РЛС. Принятые для расчетов данные приведены в таблице 2. Результаты расчетов показывают, что период колебаний рассматриваемого физического маятника будет равен 0,753 сек. Период бортовой качки морских судов, в зависимости от их размеров и конструкции корпуса, колеблется от 7 до (20 + 30) сек. [В.В. Ашин Проектирование судов. Л. «Судостроение», 1985 г. ]. Это на порядок и больше превышает период колебаний предлагаемой в заявке качающейся части антенны, что исключает возможность возникновения побочных колебаний качающихся частей антенны во время качки судна. Стабилизация оси ДН антенны судовой РЛС в вертикальной плоскости для улучшения условий наблюдения целей в условиях качки судна открывают возможность оптимизации ширины диаграммы направленности антенны в вертикальной плоскости в сторону ее уменьшения. В таблице 3 представлены результаты расчетов количественного повышения дальности обнаружения надводных целей или уменьшения энергетической характеристики РЛС в зависимости от величины диаграммы направленности антенны в вертикальной плоскости по сравнению с РЛС, имеющей ДН в 20 гр. Изложенное позволяет сделать следующие выводы. 1. Предлагаемые способ и устройство стабилизации ДН антенны судовой РЛС обеспечивают стабилизацию оси ДН антенны в вертикальной плоскости без затраты энергии, с использованием силы притяжения Земли и закономерностей физического маятника. 2. Предлагаемая конструкция стабилизированной антенны РЛС технически реализуема и работоспособна. 3. Стабилизация положения диаграммы направленности антенны в вертикальной плоскости улучшает условия и повышает надежность обнаружения морских целей в условиях качки судна, а при больших углах качки исключает возможные пропуски в обнаружении целей. 4. Использование предлагаемого стабилизированного антенного поста обеспечивает возможность уменьшения ширины ДН антенны в вертикальной плоскости и повышения за счет этого энергетической характеристики РЛС или, при сохранении неизменной дальности обнаружения целей, позволяет уменьшить излучаемую передатчиком РЛС мощность и величину потребляемой от бортсети судна энергии. 5. Уменьшение ширины диаграммы направленности антенны РЛС в вертикальной плоскости, а также возможное снижение излучаемой станцией мощности обеспечит уменьшение уровней СВЧ энергии на палубе и надстройках судна и повышение экологической чистоты РЛС. 6. Существенным преимуществом предлагаемого устройства является исключительная простота его внедрения в существующие антенные посты. В процессе внедрения устройства необходимо только заменить имеющийся облучатель антенны на новый, обеспечивающий согласованное с качкой судна сканирование оси ДН антенны в вертикальной плоскости и стабилизацию положения ДН антенны в вертикальной плоскости.
ФОРМУЛА ИЗОБРЕТЕНИЯ
1. Способ стабилизации диаграммы направленности (ДН) антенны судовой РЛС в условиях бортовой, килевой качки и рыскания, основанный на том, что определяют углы бортовой, килевой качки и рыскания, вырабатывают сигналы управления для формирования ДН антенны, обеспечивают электрическое формирование ДН антенны, непрерывно корректируют электрические сигналы управления, обеспечивая стабильное положение ДН антенны в пространстве, отличающийся тем, что определяют параметры наклона антенны с помощью физического маятника, действие которого основано на использовании силы земного притяжения, на основании этой информации обеспечивают непрерывную стабилизацию ДН антенны, выполненной зеркальной, в вертикальной плоскости на качке судна и ее наклонах вместе с судном путем согласованного с наклоном антенны подсоединения соответствующих облучателей зеркальной антенны, размещенных в фокусе, а также выше или ниже фокуса в фокальной плоскости, осуществляемого с помощью СВЧ-переключателя так, что смещение ДН антенны призводят в противоположную наклону антенны сторону на угол, равный углу наклона антенны. 2. Устройство стабилизации диаграммы направленности (ДН) антенны судовой РЛС, состоящее из зеркальной антенны с системой облучателей, обеспечивающей получение возвратно-поступательного движения луча для обзора пространства, отличающееся тем, что в состав антенны дополнительно включены СВЧ-переключатель и физический маятник, причем система облучателей размещена по вертикали в фокальной плоскости вверх и вниз от основного облучателя системы, расположенного в фокусе, на одинаковых расстояниях от центра зеркала, каждый из которых обеспечивает формирование ДН зеркальной антенны, ось которой отклонена в вертикальной плоскости от оси ДН соседнего облучателя на определенную величину, равную угловому шагу сдвига соседних облучателей, СВЧ-переключатель, соединенный с указанными основными и дополнительными облучателями и СВЧ-трактом РЛС, обеспечивает подключение к СВЧ-тракту РЛС последовательно одного или двух соседних облучателей за счет углового перемещения переключающего элемента от среднего положения, при котором подсоединен основной облучатель, вверх или вниз от основного в зависимости от направления и величины наклона антенны, физический маятник, жестко соединенный с горизонтально расположенной осью переключающего элемента СВЧ-переключателя, обеспечивает под действием силы земного притяжения зависимое от крена судна и наклона антенны последовательное подключение СВЧ-тракта РЛС к соответствующим одному или двум соседним облучателям антенны и смещение тем самым луча антенны на имеющий в данный момент угол наклона антенны в противоположную наклону сторону, сохраняя неизменным, т.е. стабилизированным, положение диаграммы направленности антенны в вертикальной плоскости, при этом ширина диаграммы направленности антенны в вертикальной плоскости, обеспечивающая необходимый угол обзора РЛС в вертикальной плоскости и практически не влияющая на точность определения направления на цель, определяемую только шириной ДН антенны в горизонтальной плоскости, в процессе стабилизации путем переключения облучателей изменяется от стандартной при подсоединении к РЛС одного любого облучателя через промежуточные значения до максимальной, имеющей место при подсоединении к РЛС двух соседних облучателей при размещении коммутирующего элемента в среднем положении между двумя соседними облучателями, при котором уровень излучаемой и принимаемой мощности соседними облучателями одинаков, а ширина суммарной ДН увеличивается на угол, равный угловому смещению указанных облучателей относительно центра зеркала, коэффициент усиления суммарной ДН уменьшается обратно пропорционально величине ее расширения, а направление луча ДН соответствует среднему положению между направлениями ДН облучателей, участвующих при этом в формировании указанной ДН антенны.www.freepatent.ru